DragonFly Observatory Controller
Installation
Lunatico's Dragonfly is an observatory controller that can be used for remotely controlling your roll off roof and more with easy powerful features including event scripting. The driver provides a simple control for roll-ff roof observatories. The Dragonfly can be used for whatever your imagination can be for your observatory to remotely control equipment, roof and more.
INDI Dragonfly driver is released can be downloaded separately and installed. It is also included in the latest Stellarmate OS download.
Documentation contributed by Mr. David Collins of Blue Ridge Observatory. Mr. Collings graciously provided unlimited access to the Blue Ridge Observatory system in order to develop and test numerous INDI state of the art drivers. Thank you for being an outstanding member of the INDI community!
The driver comes part of the Lunatico 3rd party drivers. It is compatible with libindi >= v1.8.5
Under Ubuntu, you can install the driver via:
sudo add-apt-repository ppa:mutlaqja/ppa
sudo apt-get update
sudo apt-get install indi-armadillo-platypus
Features
The driver can completely control the Dragonfly’s relays and Sensors for customizing your observatory needs for remote control. The relays can be used for many things such as switching control voltages to open or close the roof, switching lights or equipment on and off, or monitor a Safe/Unsafe weather station condition from the AAG Cloudwatcher as an example.
The driver supports the Dragonfly Sensors so you could monitor mechanical or magnetic sensors for the status of the roof or perhaps laser beam switches for positions of the telescope. With 8 relays and 8 sensors in the Dragonfly, the INDI driver gives the user great flexibility for controlling and powering devices anywhere in your observatory. Script control is also available in Ekos if you wanted to run a particular personal script for powering up or powering down your observatory due to sessions starting or ending. The driver works with weather stations supported by INDI and can recognize when unsafe conditions are present instructing the Dragonfly to close the roof.
Requirements
In order to utilize the controller for your roof control, you need the following:
- Motor: bi-directional Motor connected to a mechanism (gear, chain..etc) to open and close the roof.
- Parked Limit Switch: Parked limit switch sensor. This is the sensor to inform the motor when the roof is fully closed and is therefore considered to be in Parked state.
- Unparked Limit Switch: UnParked limit switch sensor. This is the sensor to inform the motor when the roof is fully opened and is therefore considered to be in UnParked state.
You assign two Relays for motor direction control. For example, you can use Relay #1 for motor Clock-Wise (CW) motion, whereas relay #2 can be assigned to the Counter-Clock-Wise (CCW) motion. Assuming the CW motion Opens the roof, then this relay is assigned as the open relay in the Relays tab, and vice versa. Similarly, the limit switch sensors must be connected to the controller and once they are high, the sensor is considered to be actuated (i.e. active).
Operation
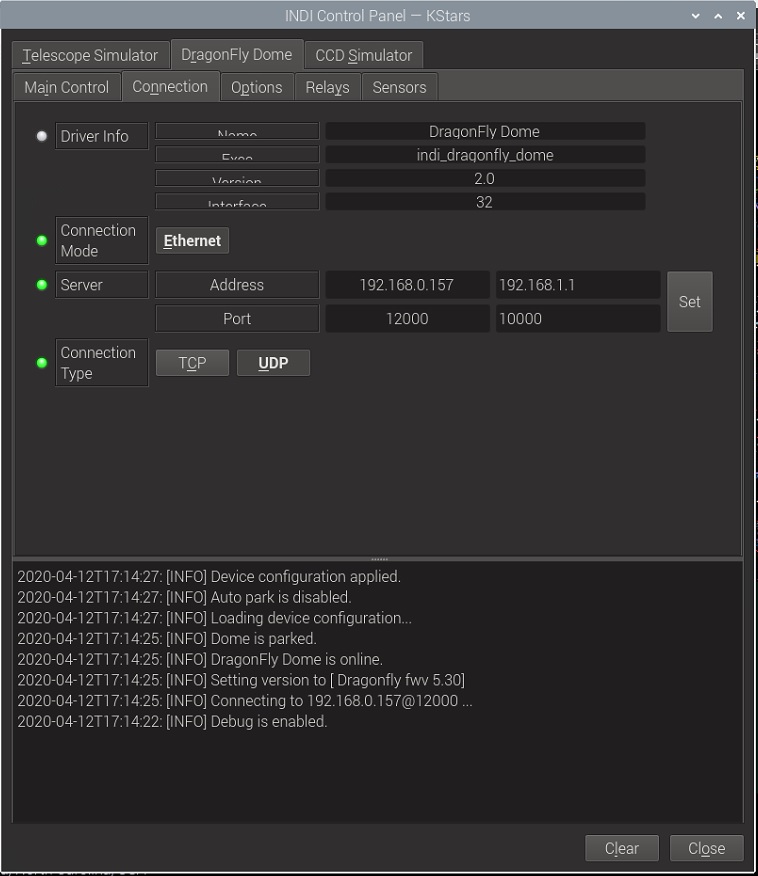
Connection
Before you establish connection with the controller, head to the connection tab and set the IP address and port of the DragonFly controller. Furthermore, in the Main Control Panel, select which port on the DragonFly the driver should utilize (Main, Exp, or Third).
Main Control panel
Once you are connected to the Dragonfly, you can control open or close motion and Park or Unpark features.
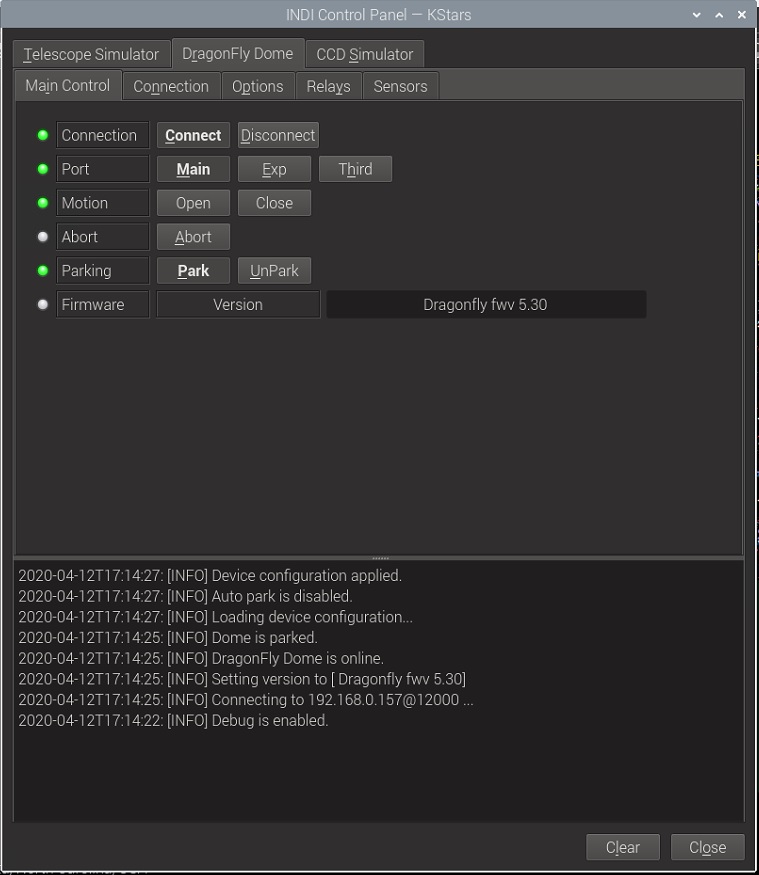
The Open / Close commands are the same as Unpark / Park commands. Opening the roof fully results in an unparked roof. Closing the roof fully results in a parked roof. The roof parking state is unknown while it is opening or closing.
Options
In the options tab, you can select logging and debugging levels in case you need to troubleshoot an issue in the driver. The snoop devices property is used to listen to properties of interest in other drivers. Since the dome can be slaved to the telescope, it needs to learn the current telescope position and its target destination. Usually these devices are automatically by your client software. The weather device is used to close to the dome in case of advert weather conditions (e.g. rain).
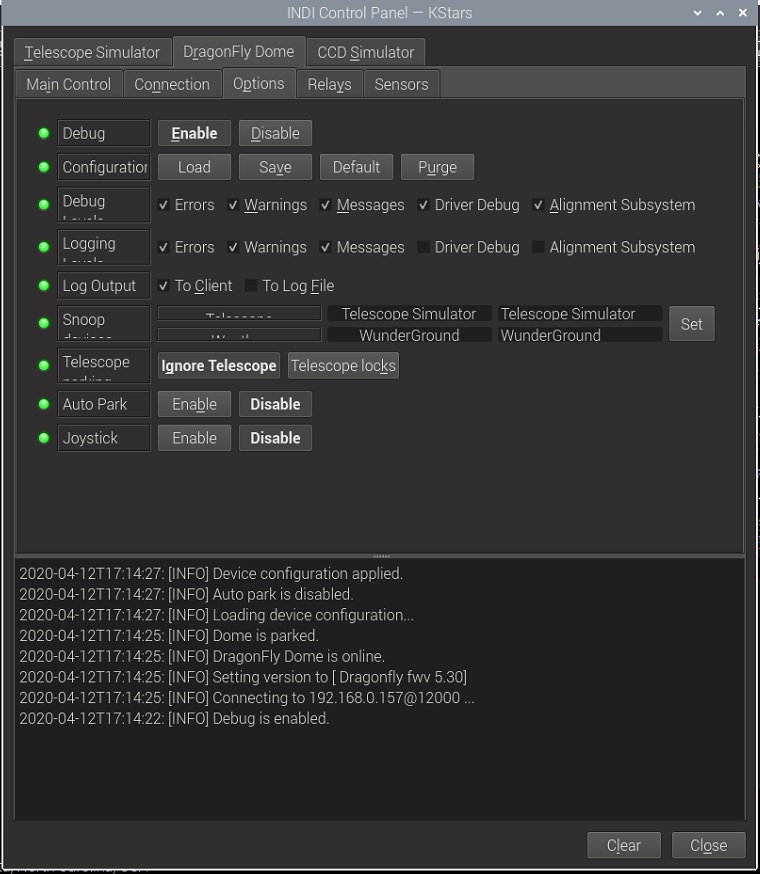
Joystick support is available to rotate the dome and park/unpark it. You need a gamepad (e.g. Playstation controller) and need to add the joystick driver in your equipment profile before you can turn on this feature. A new tab named Joystick will appear where you can set what each button or axis can do.
Policies
- Telescope Policy: Telescope policy can be either set to Ignore Telescope (default) or Telescope Locks. When the policy is set to Ignore Telescope then the dome can park/unpark regardless of the mount parking state. When it is set Telescope locks, this disallows the dome from parking when telescope is unparked, and can lead to damage to hardware if it rains.
-
Auto Park: When Auto park is enabled and If weather conditions are in the danger zone, the dome will be automatically parked. Only enable this option is parking the dome at any time will not cause damage to any equipment.
Relays
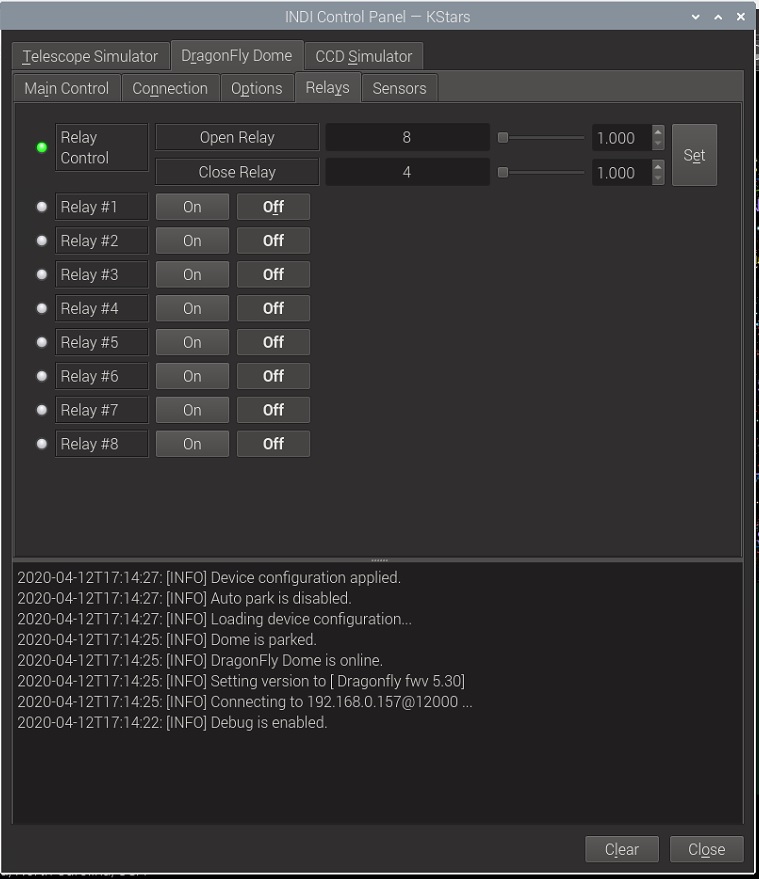
All relays can be turned on and off individually. Here you can set which relays open and close the roof so Park / Unpark knows which relays to activate in the event of bad weather, session has ended, or when you manually click on Park or Unpark.
Sensors
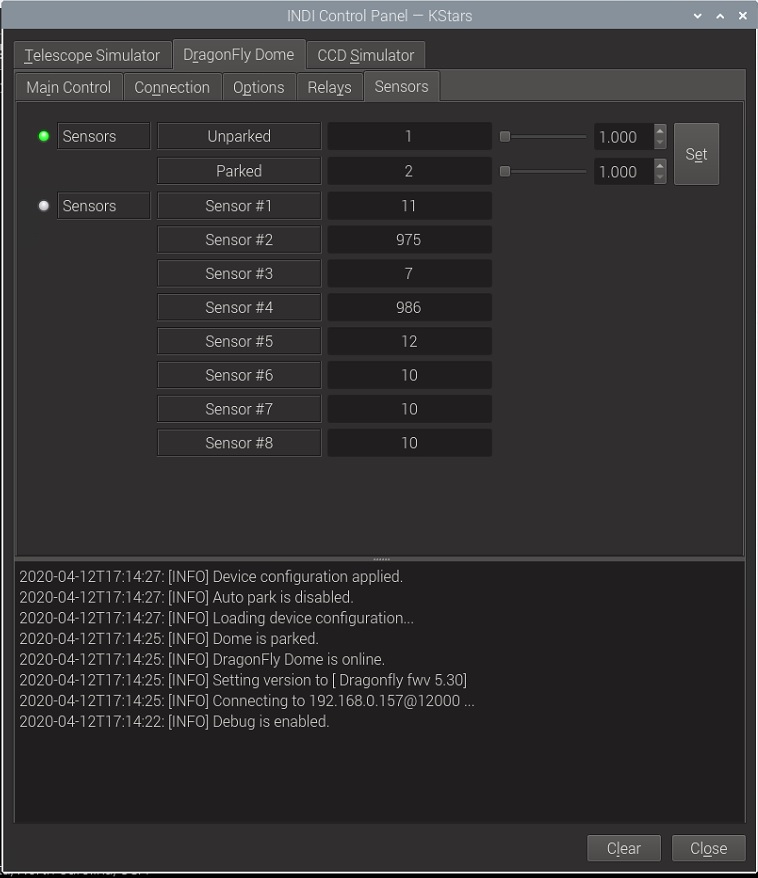
All sensors can be monitored here including which sensors are used for roof fully open (Unparked) or roof fully closed (Parked). Other sensors could be used for mechanical or magnetic sensors as well as any other function you would like to monitor.
Issues
There are no known bugs for this driver. If you found a bug, please report it at INDI's bug tracking system at SourceForge. (You can log in with a variety of existing accounts, including Google, Yahoo and OpenID.)

{kind=link}