Given time I can probably figure out what is wrong but Would like to ask if
the cause of the issue I am having is obvious to anyone.
Over the past couple of years I built a roll off observatory and this year
modified the rolloff simulator code to use an Arduino to control the roof
motor and read position switches. It has worked well enough for about 9
months. From a week or two ago the modified code crashes when Ekos connects.
It was initially built by copying other 3rdparty examples using
git clone
github.com/indilib/indi.git
After the crash started did a fresh git clone and rebuild.
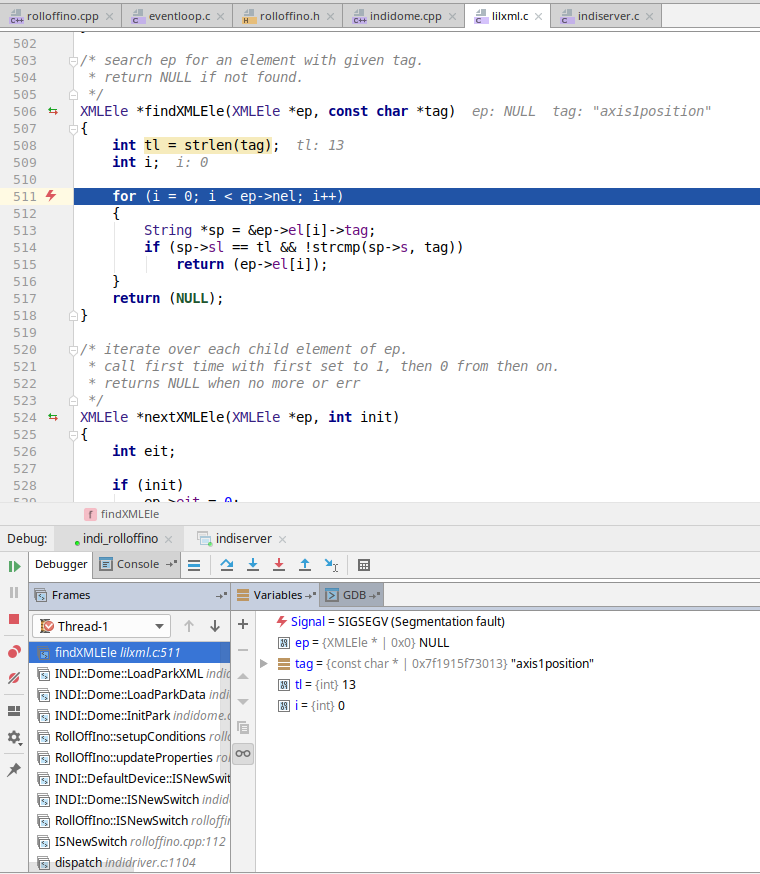
The crash happens when INDI::Dome::InitPark is called.
I'll attach a screen shot, but it winds up in lilxml.c routine findX<LEle
with the ep pointer == null and crashes in the for loop initialization on
ep->nel;
If I bypass the call to Dome::InitPark the roof opens and closes.
In that state I did a save options, in case writing out the xml file would
help. It subsequently crashes after the park when it calls
INDI::DOME::SetParked(true); I have not looked at that one since it might
be expected since InitPark was bypassed.
I wonder if there are additional Dome initialization or XML management
requirements that have been introduced recently.
Tom
Fedora 29
KStars build: 2019-01-14TO5:1537Z
libindi-bleeding.x86_64 1.7.6-5.5