INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Need help operating an arduino uno and kstars

Need help operating an arduino uno and kstars was created by Porchet
I already posted a message on the Kstars section, but I'm putting it back here.
so here it is, I created a little arduino program to open the roof of my observatory with buttons and limit switches.
But now, how do I get Kstars to control my program?
Or how do I know which command to write in "C language" to control my program that I can put in place of my OPEN and CLOSE buttons?
I'm telling you all right now that I'm starting in C language, so I think I'm missing a lot of things for kstars to communicate with my program on the arduino uno board.
thanks again for your help
And I don't speak English very well, unfortunately.
Translated with www.DeepL.com/Translator (free version)
Please Log in or Create an account to join the conversation.
- Wolfgang Reissenberger
-

- Offline
- Moderator
-

- Posts: 1185
- Thank you received: 370
Replied by Wolfgang Reissenberger on topic Need help operating an arduino uno and kstars
- Wolfgang
Please Log in or Create an account to join the conversation.
Replied by Porchet on topic Need help operating an arduino uno and kstars
Thank you for your answer, but how do we get to
"Perhaps the simplest way is to write an INDI driver. "
What do I have to write at the beginning of my CODE on the arduino if I want to
have for example the function: CONNECTION = CONNECT?
With
"There's already an indi-duino package available in indi-3rdparty"
Thank you
Christophe
Please Log in or Create an account to join the conversation.
Replied by Porchet on topic Need help operating an arduino uno and kstars
I give you my code ,but most write in french
/*Program to open the roof of my Observatory.
With 2 buttons Open,Close and an Emergency Stop.
With realy supply power
There are also 2 limit switches and a control as the telescope and of course the park position.*/
const int ledRepos = 3; // LedWaiting
const int RelaisOuverture1 = 4; // Open relay1
const int RelaisOuverture2 = 5; // Open relay2
const int RelaisFermeture1 = 6; // Close relay1
const int RelaisFermeture2 = 7; // Close relay2
const int BoutonOpen = A0; // Open button
const int BoutonClose = A1; // Close button
const int BoutonStop = A2; // Stop button
const int FinOuverture = 12; // limit switche Open
const int FinFermeture = 10; // limit switche Close
const int Telescope_Parc =2; // park position switche
const int BoutonRelais =A3; // Power supply control
const int pinRelais =8; // Power supply relay
int BoutonOpenState = 0;
int BoutonCloseState = 0;
int FinOuvertureState = 0;
int FinFermetureState = 0;
int Telescope_ParcState = 0;
int BoutonStopState = 0;
bool BoutonRelaisState = LOW;
//les états possible
enum {Repos, Ouverture, Ouvert, Fermeture, Fermer};
int etat = Repos;
bool estAlimente = false;
// le N° des connection et fonction
void setup() {
pinMode(ledRepos, OUTPUT); // LedWaiting
pinMode(RelaisOuverture1, OUTPUT);
pinMode(RelaisOuverture2, OUTPUT);
pinMode(RelaisFermeture1, OUTPUT);
pinMode(RelaisFermeture2, OUTPUT);
pinMode(BoutonOpen, INPUT_PULLUP);
pinMode(BoutonClose, INPUT_PULLUP);
pinMode(BoutonStop, INPUT_PULLUP);
pinMode(FinOuverture, INPUT_PULLUP);
pinMode(FinFermeture, INPUT_PULLUP);
pinMode(Telescope_Parc, INPUT_PULLUP);
}// fin setup
void position_toit () { // début des statuts pour le loop
switch (etat) { // début du switch avec les possibilté
case Repos:
digitalWrite(ledRepos, HIGH); // LedWaiting
digitalWrite(RelaisOuverture1, LOW);
digitalWrite(RelaisOuverture2, LOW);
digitalWrite(RelaisFermeture1, LOW);
digitalWrite(RelaisFermeture2, LOW);
if (BoutonOpenState == LOW && Telescope_ParcState == LOW ) {
etat = Ouverture;
delay(30);
}
else if(BoutonCloseState == LOW && FinFermetureState == HIGH ){
etat = Fermeture;
delay(30);
}
break;
case Ouverture:
digitalWrite(ledRepos, LOW); // LedWaiting
digitalWrite(RelaisOuverture1, HIGH);
digitalWrite(RelaisOuverture2, HIGH);
digitalWrite(RelaisFermeture1, LOW);
digitalWrite(RelaisFermeture2, LOW);
if (FinOuvertureState == LOW) {
etat = Ouvert;
delay(30);
}
else if(Telescope_ParcState == HIGH || BoutonStopState == LOW) {
etat = Repos;
delay(30);
}
break;
case Ouvert:
digitalWrite(ledRepos, HIGH); // LedWaiting
digitalWrite(RelaisOuverture1, LOW);
digitalWrite(RelaisOuverture2, LOW);
digitalWrite(RelaisFermeture1, LOW);
digitalWrite(RelaisFermeture2, LOW);
if (BoutonCloseState == LOW && Telescope_ParcState == LOW ) {
etat = Fermeture;
delay(30);
}
break;
case Fermeture:
digitalWrite(ledRepos, LOW); // LedWaiting
digitalWrite(RelaisOuverture1, LOW);
digitalWrite(RelaisOuverture2, LOW);
digitalWrite(RelaisFermeture1, HIGH);
digitalWrite(RelaisFermeture2, HIGH);
if (FinFermetureState == LOW) {
etat = Fermer;
delay(30);
}
else if(Telescope_ParcState == HIGH || BoutonStopState == LOW) {
etat = Repos;
delay(30);
}
break;
case Fermer:
digitalWrite(ledRepos, LOW); // LedWaiting
digitalWrite(RelaisOuverture1, LOW);
digitalWrite(RelaisOuverture2, LOW);
digitalWrite(RelaisFermeture1, LOW);
digitalWrite(RelaisFermeture2, HIGH);
etat = Repos;
break;
} //fin switch
}// fin void
void loop() {
BoutonRelaisState = digitalRead (BoutonRelais) ;
if (BoutonRelaisState == HIGH) {
estAlimente = !estAlimente;
delay (30);
}
if (estAlimente) {
digitalWrite (pinRelais, HIGH);
// début du programme des fonctions
BoutonOpenState = digitalRead (BoutonOpen) ;
BoutonCloseState = digitalRead (BoutonClose) ;
FinOuvertureState = digitalRead (FinOuverture) ;
FinFermetureState = digitalRead (FinFermeture) ;
Telescope_ParcState = digitalRead (Telescope_Parc);
BoutonStopState = digitalRead (BoutonStop);
position_toit() ;
} else digitalWrite (pinRelais, LOW);
} // fin loop ou programmePlease Log in or Create an account to join the conversation.
Replied by Porchet on topic Need help operating an arduino uno and kstars
if it will help you help me.
Please Log in or Create an account to join the conversation.
- Wolfgang Reissenberger
-
- Offline
- Moderator
-
- Posts: 1185
- Thank you received: 370
Replied by Wolfgang Reissenberger on topic Need help operating an arduino uno and kstars
no need to translate, my French is sufficient.
As far as I understand your Arduino code, you have buttons to control your dome. Or what are "BoutonOpen" and "BoutonClose"?
What you first need to think about is how to connect your Arduino with another software running outside of the Arduino.
I think the easiest way is using the serial interface of the Arduino and read and write through this interface. I guess you have your Arduino connected via USB. If you for example read and write to the USB device, you could for example write a specific INDI driver for your dome, that reads and writes on this USB device.
Does it make sense to you?
- Wolfgang
Please Log in or Create an account to join the conversation.
Replied by Porchet on topic Need help operating an arduino uno and kstars
Then you understand very well, I have indeed 3 buttons to have a manual control from inside my observatory.
Open Button, Close Button and Stop Button.
My idea was to be able to connect my arduino to my PC which is in my observatory where I can connect remotely.
The problem is that I don't know how to make the two communicate together.
I have already had trouble making the code of the arduino, because I begin in the C language.
I understand that Kstars is controlling an arduino, but that I have to add in my CODE to make it work.
I think that the ideal would have been to find the command that will be put in the place of my open and close buttons, but I'm not sure it's possible.
The other solution is to implement a program in parallel or in the CODE I wrote so that both work but with priority to the command from Kstars.
But is it possible?
Please Log in or Create an account to join the conversation.
- Wolfgang Reissenberger
-
- Offline
- Moderator
-
- Posts: 1185
- Thank you received: 370
Replied by Wolfgang Reissenberger on topic Need help operating an arduino uno and kstars
- Change your Arduino code so that it may react upon commands from the Serial interface. Simply call google with “arduino serial command”
- Write your own INDI dome driver that communicates with your Arduino over the commands you define. As an example, you could take a closer look to the Maxdome implementation
Wolfgang
Please Log in or Create an account to join the conversation.

Replied by wotalota on topic Need help operating an arduino uno and kstars
If you have not already done so, I would suggest you at least browse the material under the develop menu at the top of the web page.
Regards
Tom
Please Log in or Create an account to join the conversation.
Replied by Porchet on topic Need help operating an arduino uno and kstars
then I'd be interested in an example or the code you've developed.
And see if there's anything I can do to adapt it to mine.
Hello, Wolfgang.
My problem is I don't know how to write a driver and I'm not sure how to do it.
I've tried to understand, but since I use translators (since my English is not very good).
And I'm not even sure that even without that I'll understand how to do it.
best regards
Christophe
Please Log in or Create an account to join the conversation.
Replied by wotalota on topic Need help operating an arduino uno and kstars
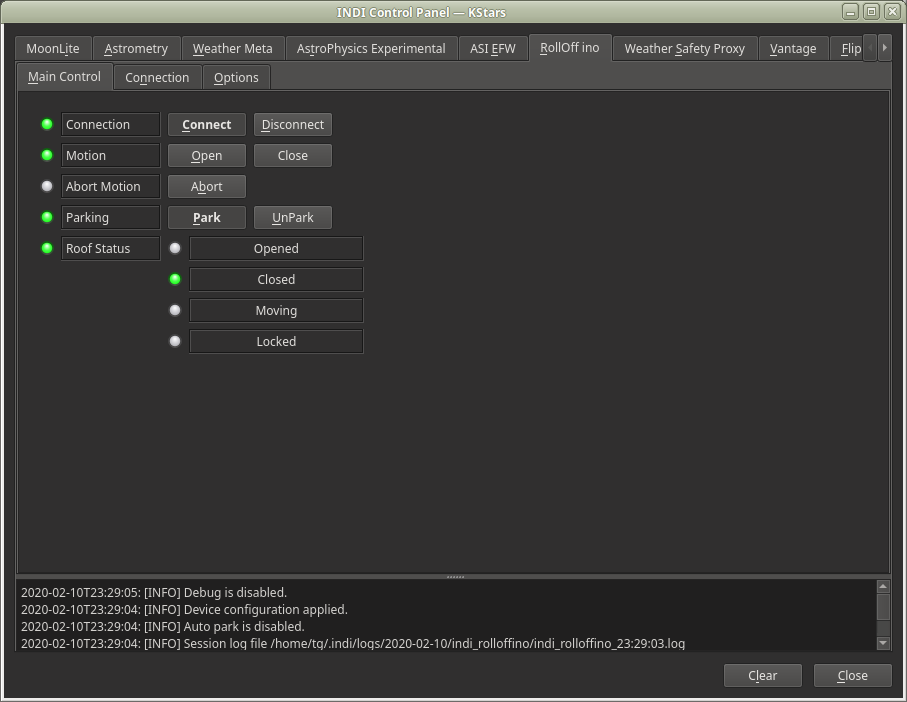
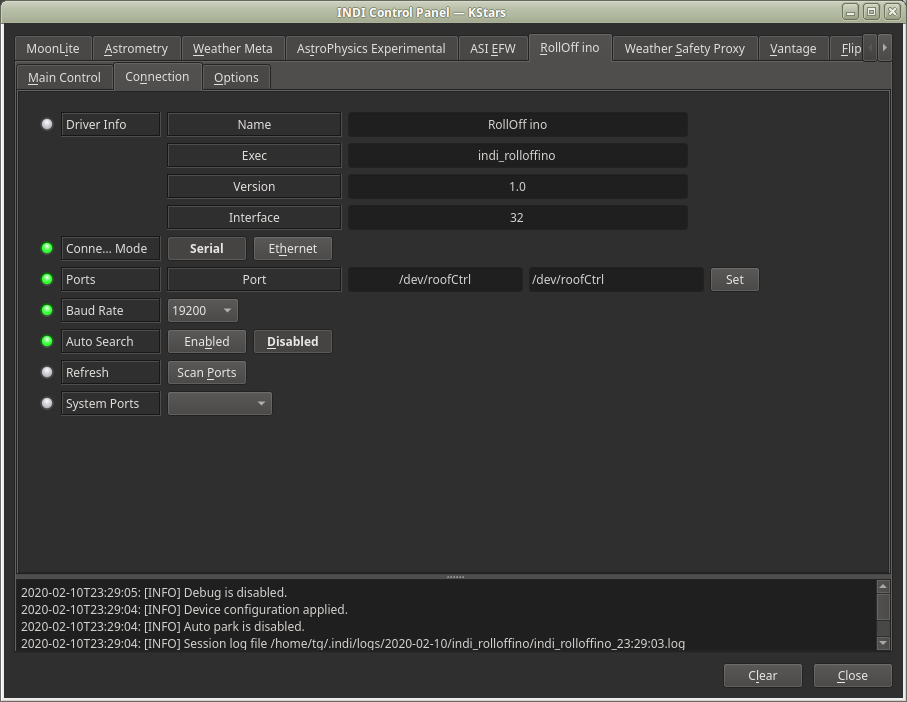
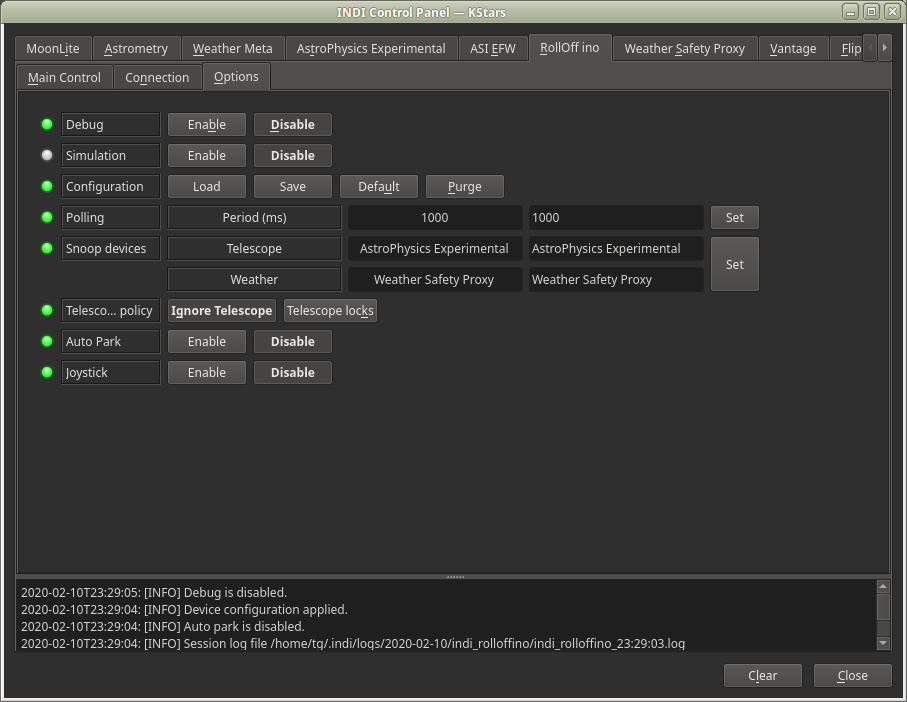
my.pcloud.com/publink/show?code=kZaL7skZ...2bLwxV56lCGRESSCCYz7
rolloffino.tar.gz
It contains the Arduino sketch, the rest is the INDI driver and what is needed to build it as a 3rd Party driver and make it accessible in Ekos. There are a couple of notes to myself in there since I forget everything after a week or two. A first step might be to learn how to build INDI and a 3rd party driver. If you are using the nightly builds this can be reduced to a few directions and scripts. I have not tried to locate the sources for a particular stable release but expect that is possible.
Please Log in or Create an account to join the conversation.
Replied by Porchet on topic Need help operating an arduino uno and kstars
Thanks for the files!
But could you explain a little bit about your files.
Because I don't understand them all, alas.
Because the ready file on the arduino program is much shorter than the rolloffino files and what is the difference between the two files?
rolloffino?
As you can see, I'm a beginner.
Thanks again for your help
Please Log in or Create an account to join the conversation.