INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
"Dome parking / Telescope parking" policy
- Gonzothegreat
-
 Topic Author
Topic Author
- Offline
- Moderator
-

- Posts: 2255
- Thank you received: 223
"Dome parking / Telescope parking" policy was created by Gonzothegreat
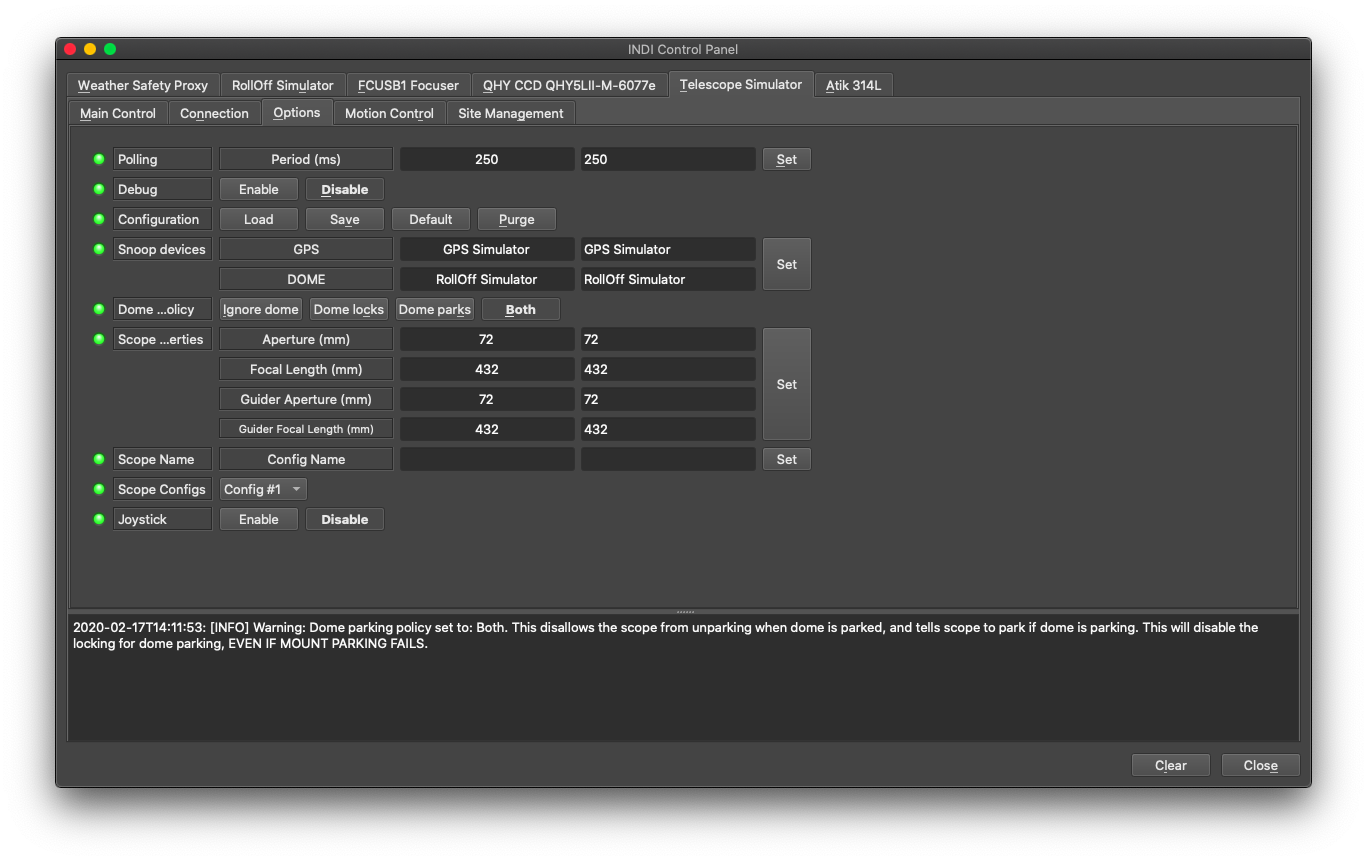
EQmod: Dome parking policy set to: Both
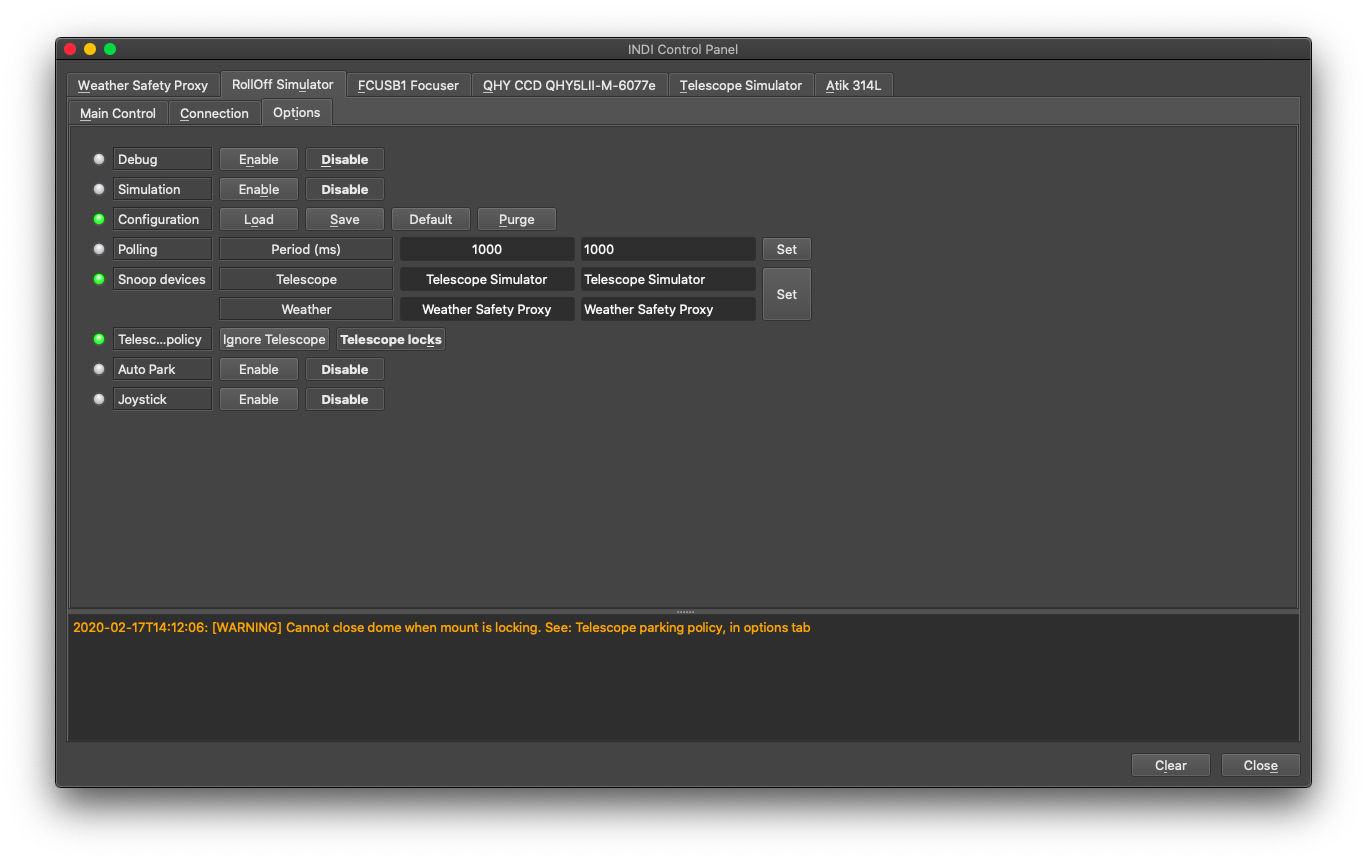
Dome: Telescope parking policy set to: Telescope locks
Dome is open, scope is unparked. I issue a park for the dome, in theory it should park the scope then park the dome. However this does not work as intended.
Dome: "2020-02-16T13:51:31: [WARNING] Cannot close dome when mount is locking. See: Telescope parkng policy, in options tab "
EQmod: "2020-02-16T13:51:21: [INFO] Mount is unparked. " <-- mount hasn't parked despite the policy set to Both
"2020-02-16T13:53:25: [INFO] Warning: Dome parking policy set to: Both. This disallows the scope from unparking when dome is parked, and tells scope to park if dome is parking. This will disable the locking for dome parking, EVEN IF MOUNT PARKING FAILS. "
Also tried with the simulators, it's not working.
ekos 3.4.0
indi 1.8.3
Please Log in or Create an account to join the conversation.
- Gonzothegreat
-
Topic Author
- Offline
- Moderator
-
- Posts: 2255
- Thank you received: 223
Replied by Gonzothegreat on topic "Dome parking / Telescope parking" policy
The mount does not park automatically, stoping the roof/dome from parking.

Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-

- Online
- Administrator
-

Replied by Jasem Mutlaq on topic "Dome parking / Telescope parking" policy
Please Log in or Create an account to join the conversation.
- Gonzothegreat
-
Topic Author
- Offline
- Moderator
-
- Posts: 2255
- Thank you received: 223
Replied by Gonzothegreat on topic "Dome parking / Telescope parking" policy
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Online
- Administrator
-
Replied by Jasem Mutlaq on topic "Dome parking / Telescope parking" policy

Please Log in or Create an account to join the conversation.
- Gonzothegreat
-
Topic Author
- Offline
- Moderator
-
- Posts: 2255
- Thank you received: 223
Replied by Gonzothegreat on topic "Dome parking / Telescope parking" policy
afraid so.
Please Log in or Create an account to join the conversation.
- Gilles Gagnon
-

- Offline
- Elite Member
-

- Posts: 294
- Thank you received: 54
Replied by Gilles Gagnon on topic "Dome parking / Telescope parking" policy
As the mount unpark was working correctly when both mount and dome were parked, I only tested dome park when mount was not parked. I positionned the mount close but not at its park position such as if the dome was closed (parked) no collision would occur.
I tested the following 2 conditions:
1. Mount Locks - Dome Both
After issuing a dome park command, the dome parked first and the mount parked after the dome was closed. So, unless your mount is in a position that would avoid collision, there will likely be damage to mount and scope, as mentionned in Gonzo's case study.
2. Mount Locks - Dome Locks
After issuing a dome park command, the dome parked first and the mount did not park after the dome was closed, it was still tracking. as in the previous case, unless your mount is in a position that would avoid collision, there will likely be damage to mount and scope, but furthermore, as the mount is still tracking, damage will ultimately occur.
I understand the mount should explicitely be parked before the dome is but I assume the safest sequence should be that if a dome park command is issued, it should make sure that the mount is parked first before parking the dome, and if not, it should tell the mount driver to park the mount before it parks the dome. I realize the the python scripts may need to do the appropriate checking but I thought that INDI was taking care of that.
Hope this helps.
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Online
- Administrator
-
Replied by Jasem Mutlaq on topic "Dome parking / Telescope parking" policy
Please Log in or Create an account to join the conversation.
- Gilles Gagnon
-
- Offline
- Elite Member
-
- Posts: 294
- Thank you received: 54
Replied by Gilles Gagnon on topic "Dome parking / Telescope parking" policy
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Online
- Administrator
-
Replied by Jasem Mutlaq on topic "Dome parking / Telescope parking" policy
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Online
- Administrator
-
Replied by Jasem Mutlaq on topic "Dome parking / Telescope parking" policy
Please Log in or Create an account to join the conversation.
- Gilles Gagnon
-
- Offline
- Elite Member
-
- Posts: 294
- Thank you received: 54
Replied by Gilles Gagnon on topic "Dome parking / Telescope parking" policy
Please Log in or Create an account to join the conversation.