INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
DIY motorised roll-off observatory roof - what INDI driver?
- Ferrante Enriques
-

- Offline
- Elite Member
-

- Posts: 249
- Thank you received: 62
Replied by Ferrante Enriques on topic DIY motorised roll-off observatory roof - what INDI driver?
I had to configure a roof with dome scripting gateway some weeks ago and ran in similar issues.
Did you set the folder containing the scripts as relative path? try to enter the full path.
And if you have any includes in the script itself, check the paths.
Check if it's not executed as a python2 script .
ferrante
PS: just saw that your post is more than one year old. Guess my suggestion came too late...
Please Log in or Create an account to join the conversation.

Replied by Krish on topic DIY motorised roll-off observatory roof - what INDI driver?
Is this currently only for non Mac Kstars/Ekos use?
What hardware will this connect to when used?
Thanks
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-

- Away
- Administrator
-

Replied by Jasem Mutlaq on topic DIY motorised roll-off observatory roof - what INDI driver?
Please Log in or Create an account to join the conversation.
Replied by Krish on topic DIY motorised roll-off observatory roof - what INDI driver?
Thanks for the link. I did take a look at Tom’s page: github.com/wotalota/indi-rolloffino.git
I am not a code writer as such don’t know the differences between the different platforms.
Do you know if I will be able to use the driver codes on Tom’s page on a MacOS or will the code be different for making a driver for MacOS?
Thanks
Krish
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Away
- Administrator
-
Replied by Jasem Mutlaq on topic DIY motorised roll-off observatory roof - what INDI driver?
Please Log in or Create an account to join the conversation.
Replied by Krish on topic DIY motorised roll-off observatory roof - what INDI driver?
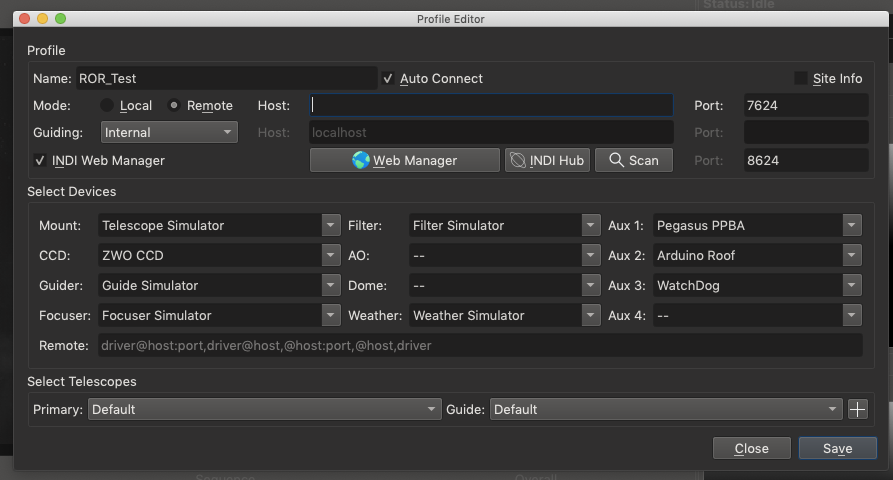
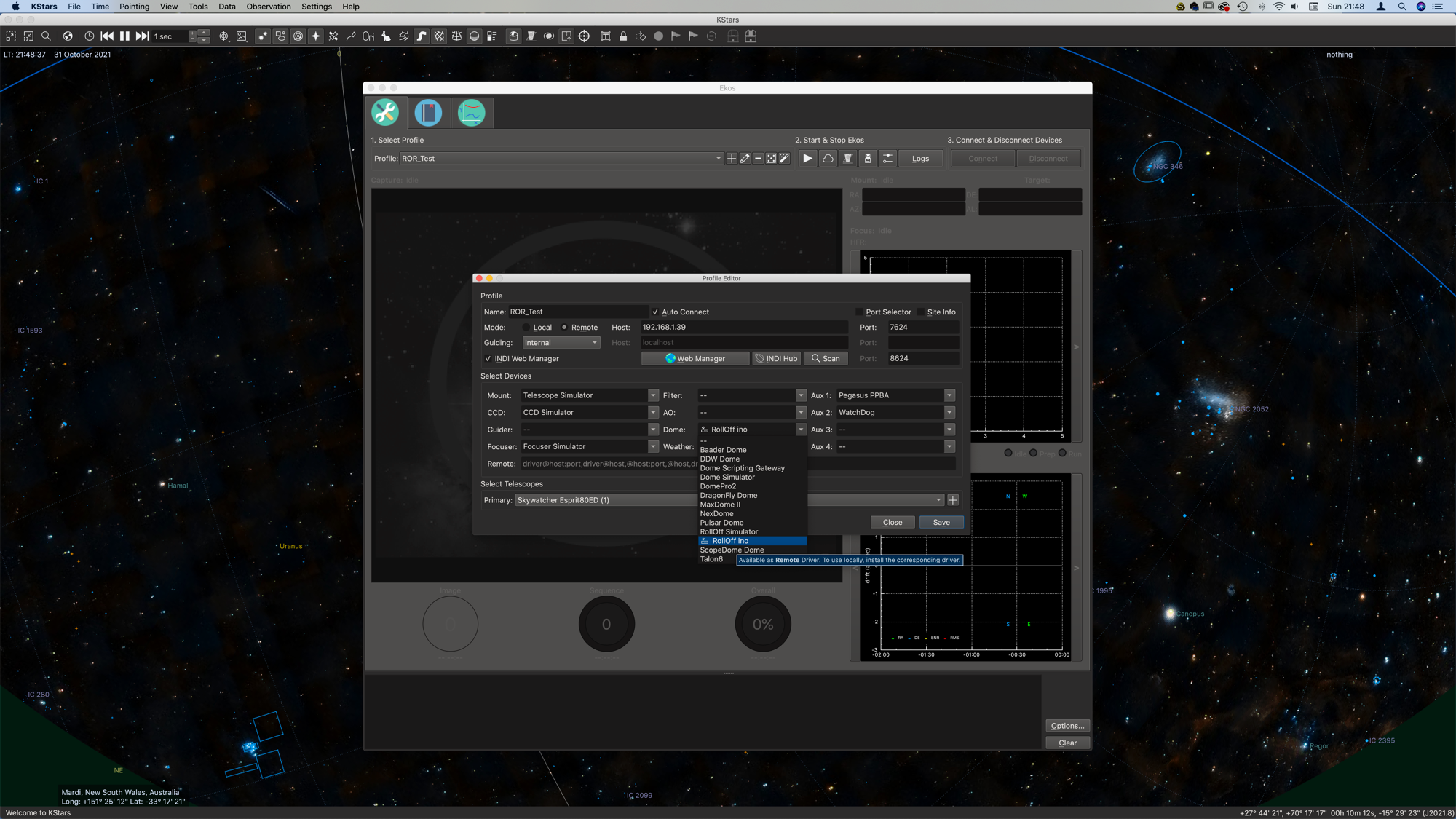
Thanks I think I may have installed the driver "RollOff ino" on one of my Macs or I a seeing it because I may have installed it on StellarMate(RPi). The Mac has KStars 3.5.5, not sure if the driver come with that version of KStars.
However I get this message "Available as Remote Driver. To use locally, install the corresponding driver." I have attached a screenshot.
Any idea what I may have missed?
Thanks
Krish
Please Log in or Create an account to join the conversation.
Replied by Krish on topic DIY motorised roll-off observatory roof - what INDI driver?
When I try to connect to the Arduino I it does not connect. I have tried various port options.
I tried the Talon6 driver. There seems to be a connection as the Observatory module does have the necessary control buttons and information but it does not actually control or read anything on the Arduino. I even tried what I think it the Aduino Sketch for the Talon6 hardware.
Thanks
Please Log in or Create an account to join the conversation.

Replied by wotalota on topic DIY motorised roll-off observatory roof - what INDI driver?
Perhaps you can describe what you are running and where. Do you have KStars/Ekos on a MacOS connecting to a remote Raspberry Pi, or MacOS. Or will everything run on a single Mac? Also confirm what you have installed on the Arduino, if it is code you modified from one of the rolloffino examples can you locate its version number in the code? The usual reason for connection problem is matching the Arduino default baud rate for the rolloffino of 38400 in the driver's INDI setup tab.
I think the Talon6 driver is intended to support specific roof hardware. It would be helpful I think to settle on one particular approach and hardware configuration at a time. Perhaps a specific thread for that approach.
The script based approach seems like it should be the easiest route. The rolloffino will be integrated but a downside is it needs to be built. Because it is not integral to INDI as Ekos versions change it will from time to time require a rebuild.
If you are going to be running a distributed configuration with Ekos on Mac and indiserver on Rpi I assume we would need to build the executable driver on the pi and do the Ekos setup on the MacOS.
The few I have worked with have first operated the Arduino using a breadboard or with the motor disconnected from the roof to test that the relay and limit switches properly controlled the selected motor.
Please Log in or Create an account to join the conversation.
Replied by Krish on topic DIY motorised roll-off observatory roof - what INDI driver?
I have stellarmate on a RPi4.
I have Arduino connected to RPi4
I run KStars/Ekos on my Mac.
I am also testing this on a bench.
I may be trying things without going through the right sequence of events to get it to work.
I have attached a zip file of what Tom has on the GIT page.
Could you perhaps please give me the steps I should follow to get the Mac side of things set up.
Then which of the Arduino Sketches I should use for it to be compatible with the Mac side set up.
Thanks
Please Log in or Create an account to join the conversation.
Replied by wotalota on topic DIY motorised roll-off observatory roof - what INDI driver?
So you have your drivers running remotely on the RPi4. The INSTALL file has the basic directions for building the rolloffino driver on the RPi4. If you have worked through that you should see the driver executable along with the other drivers you are running on the RPi4: /usr/bin/indi_rolloffino. Once there it can be started like the other drivers. It does not seem like anything special should be required for the Mac side compared to the remote specification of the driver.
So the focus can be on installing the prerequisites and doing the build on the RPi4 if that has not been completed. I would request that you again clone/fetch the sources to make sure you have a recent change made in the past few days to rolloffino.cpp.
If you have gone through the build steps then see if the driver is already running under the indiserver and if the issue is that the driver is not communicating with the Arduino. I normally do that with `ps -ef|grep -i indi` in a terminal window on the RPi4.
The Arduino sketch is responsible for the roof movement and safety. It receives the open or close requests and responds to queries about whether the roof is fully opened or closed. rolloffino.standard is a basic template example which provides the communication with the driver, generic relay control and switch input code as a starting point. The rolloff.ino.boutons is from Christophe's installation it tracks the roof movement and state controlling the motor to start and stop the motor used in his installation. rolloffino.ino.ar1450 is from my install using a sliding gate controller that itself controls when to stop the roof movement. The Arduino code is where the work is, its functioning is unknown to the driver. Christophe had a working sketch using local buttons to open and close the roof so that was adapted to add communication with the driver. For the AR1450 all that was need was to use a relay to act in place of a single push button. Such things as stopping or reversing direction if there is an obstruction came for free with the built in controller.
Use the standard version as a starting point if the other two do not provide features that are useful for your design.
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Away
- Administrator
-
Replied by Jasem Mutlaq on topic DIY motorised roll-off observatory roof - what INDI driver?
Please Log in or Create an account to join the conversation.
Replied by wotalota on topic DIY motorised roll-off observatory roof - what INDI driver?
Please Log in or Create an account to join the conversation.