INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
New All Sky camera management software: indi-allsky
- Aaron Morris
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

- Posts: 257
- Thank you received: 66
New All Sky camera management software: indi-allsky was created by Aaron Morris
Like many others, when I setup my first All Sky camera, I used Thomas Jacquin's fantastic allsky software. It works very well, obviously. My first camera was a ASI290MM, but I wanted to setup a color all sky camera and I wanted to see if I could use the Svbony SV305 [IMX290] camera which is at least half the cost of most planetary cameras in the same class.I think one of the biggest requests for enhancement for Thomas Jacquin's allsky is supporting more than just ZWO and Raspberry PI cameras. For this reason, I decided to build my software around INDI. This would have the possibility of supporting any camera supported by INDI. The SV305 INDI support was about 6 months old at the time I started, but seemed to be reasonably stable.
8 months later, I think the software is stable enough to be released:
github.com/aaronwmorris/indi-allsky/
At this point, the camera and image management is roughly at parity with Thomas Jacquin's allsky. I do not have the fancy web interface yet, but I do have some simple web viewers. The software is written in Python and utilizes the pyindi-client for the INDI interface. Python may seem like a non-optimal choice, but most of the functionality is actually C-based modules (pyindi-client, OpenCV, pycurl, ffmpeg) so most operations are lightning fast. The code is also implemented using Python multiprocessor semantics, so actions are implemented in parallel--operations like file uploads will not interfere with image acquisition.
I have been running both of my all sky cameras with my software for the past few months and INDI seems to be well up to the task for weeks of constant runtime.
Features:
- Theoretically supports any INDI camera. The software will automatically detect the camera on startup
- ASI290MM has been extensively tested.
- SV305 has been extensively tested.
- QHY cameras supported
- Canon DSLRs supported
- Time lapse movie generation
- Keograms
- Day and night time support
- Special "moon mode" operation reduces gain when the moon is out.
- File upload support
- Automatic image debayering
Let me know what you think.
Please Log in or Create an account to join the conversation.
- Chris Ryan
-

- Offline
- Elite Member
-
- Posts: 205
- Thank you received: 19
Replied by Chris Ryan on topic New All Sky camera management software: indi-allsky
How have you got it setup on the hardware side? Do you have some all weather enclosure, etc?
Please Log in or Create an account to join the conversation.
Replied by S on topic New All Sky camera management software: indi-allsky
")
I mainly use my all-sky for cloud detection. Do you have support for could detection? I do it by counting the number of stars, which seems to work pretty well but not 100%....
Please Log in or Create an account to join the conversation.
- Aaron Morris
-
Topic Author
- Offline
- Elite Member
-
- Posts: 257
- Thank you received: 66
Replied by Aaron Morris on topic New All Sky camera management software: indi-allsky
Please Log in or Create an account to join the conversation.
- Aaron Morris
-
Topic Author
- Offline
- Elite Member
-
- Posts: 257
- Thank you received: 66
Replied by Aaron Morris on topic New All Sky camera management software: indi-allsky
I built a second version just using a generic junction box from Amazon. I actually prefer the one from Home Depot, but they were out of stock for a long time (possibly due to the pandemic).
This is an image of my "mark 1" device.

Please Log in or Create an account to join the conversation.
Replied by S on topic New All Sky camera management software: indi-allsky
To make the cloud detection more accurate, one could compared the measured number of stars with the expected number of stars, if that can be obtained from kstar. I just have a fixed limit at the moment, which sometimes fails.
Please Log in or Create an account to join the conversation.
- Aaron Morris
-
Topic Author
- Offline
- Elite Member
-
- Posts: 257
- Thank you received: 66
Replied by Aaron Morris on topic New All Sky camera management software: indi-allsky
I found another method using OpenCV template matching that is much faster and more sensitive.
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-

- Online
- Administrator
-

Replied by Jasem Mutlaq on topic New All Sky camera management software: indi-allsky
Please Log in or Create an account to join the conversation.
- Aaron Morris
-
Topic Author
- Offline
- Elite Member
-
- Posts: 257
- Thank you received: 66
Replied by Aaron Morris on topic New All Sky camera management software: indi-allsky
From reading the documentation, it seems to be best described as finding instances of a picture within another picture. You can use this for complex pattern matching, but stars are very simple objects. In most of the examples I looked at, they included an example image of a star. In my case, instead of using a real star image, I just generate a fake star image using cv2 by drawing a white circle and applying a blur() function to it--a perfect star every time.
As for the speed, it is one of the faster methods I have used. It can find all of the stars in a 1920x1080 image covering 120 degress of the sky in about a second. The only problem is that it generates a lot of duplicate findings, finding the same star multiple times. Eliminating the duplicates slows things down a lot, but still *at least* 2-3 times faster than scikit-image blob_dog() for similar results. It is not perfect, but it is good enough for my purposes.
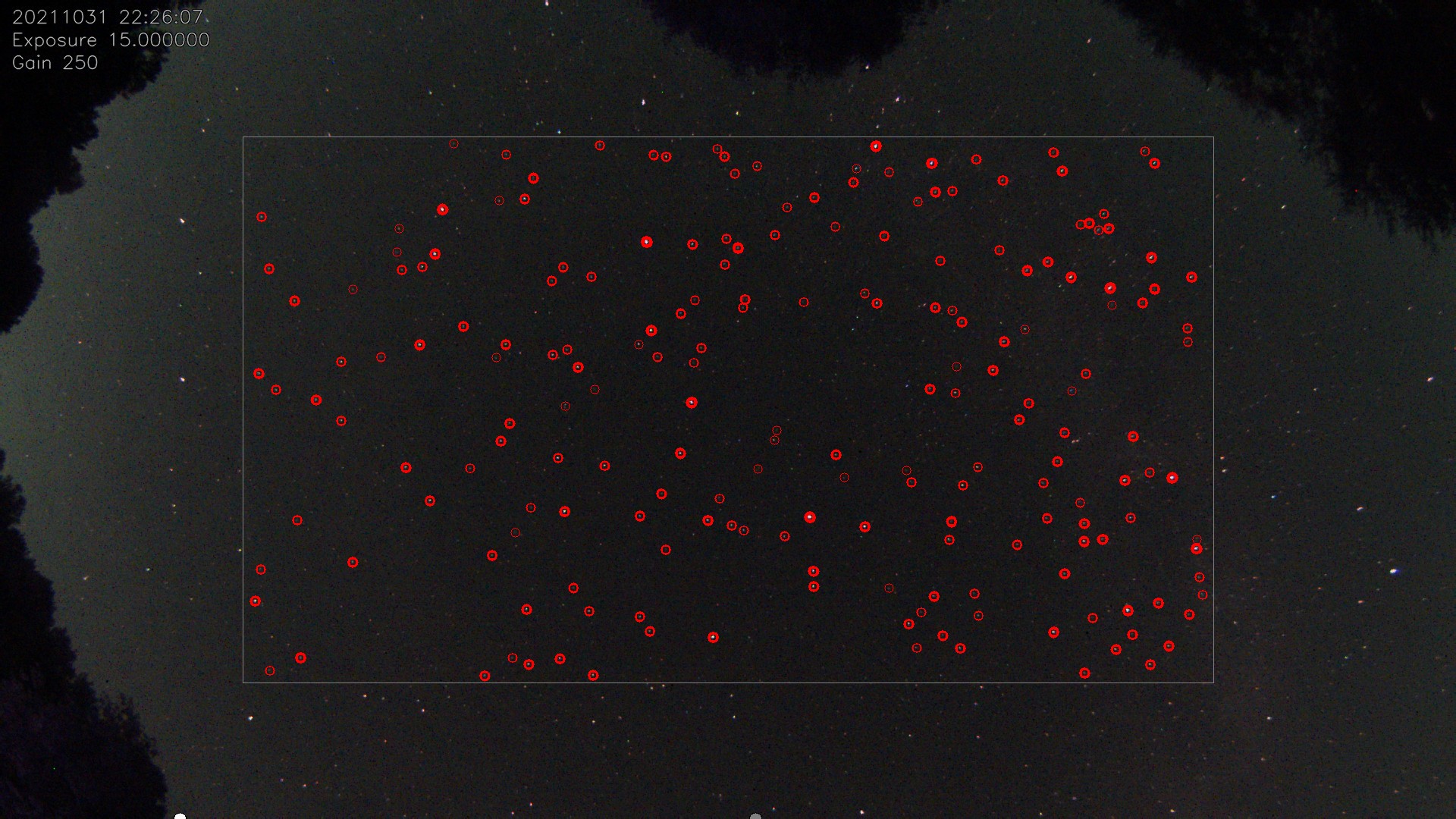
Here is an example. I only look for patterns in the central box of the image. This is to stay away from the trees. The gaps in the leaves look like stars to the pattern matching.
1035 "stars" were detected in 0.5 seconds on a Raspberry PI 3. The brighter the red circle, the more times it was duplicated.
Eliminating the duplicates brings the star count to 198 which adds another 2 seconds to processing.
Attachments:
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-
- Online
- Administrator
-
Replied by Jasem Mutlaq on topic New All Sky camera management software: indi-allsky
Please Log in or Create an account to join the conversation.
- Martin Lines
-
- Offline
- New Member
-

- Posts: 10
- Thank you received: 1
Replied by Martin Lines on topic New All Sky camera management software: indi-allsky
Please Log in or Create an account to join the conversation.
- Aaron Morris
-
Topic Author
- Offline
- Elite Member
-
- Posts: 257
- Thank you received: 66
Replied by Aaron Morris on topic New All Sky camera management software: indi-allsky
Please Log in or Create an account to join the conversation.