INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
New Internal Guider Features
- John Carter
-

- Offline
- New Member
-

- Posts: 6
- Thank you received: 0
Replied by John Carter on topic New Internal Guider Features
When I try to connect INDI to my USB Microtouch focuser, it only shows me the options for Serial and Ethernet.
Please Log in or Create an account to join the conversation.

Replied by Doug S on topic Option to avoid DEC reverse motion?
Thanks for all your work on this. I tried to switch back to the internal guider from PHD2 the other night, but was halted by DEC backlash issues during calibration. I took my scope down and have chased this to tune it up a bit, but I also wonder whether there shouldn't be an option to disable reverse DEC moves during calibration. This still allows the calibration angles to be set, but avoids getting stuck by DEC backlash. Forward calibrations would work normally, and reverse motion on RA would still function the same. Not doing a DEC offset back to original position would force the user to re-solve (if desired), but that seems minor. This could open more doors for folks with DEC backlash.
Now that I think of it, I'm not sure there's an equivalent option as in PHD2 to set or disable one/both DEC guide direction(s). Do we have that? That feature would be desired too (so some folks could intentionally misalign PA, forcing DEC motions to be unidirectional. Anyway, just a couple of thoughts to possibly make this handle some bad cases slightly better.
Cheers, Doug
Please Log in or Create an account to join the conversation.

Replied by hades on topic New Internal Guider Features
In pixels I am getting value 0,09, in arc-seconds it is 0,6 (0,09*guider image scale). Which one is correct?
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
 Topic Author
Topic Author
- Away
- Administrator
-

- Posts: 1221
- Thank you received: 565
Replied by Hy Murveit on topic New Internal Guider Features
I double-checked the code, that is correct.
Attachments:
Please Log in or Create an account to join the conversation.
Replied by hades on topic New Internal Guider Features
Please Log in or Create an account to join the conversation.
Replied by Rene on topic New Internal Guider Features
Now from my understanding the corrections made by GPG aren't persistent. That is, for each new imaging session I start, GPG has to re-learn what my mounts PE is before it can make corrections. For me that means at least 30mins of sitting around waiting until GPG does it's thing.
So I was wondering if it was possible for the corrections to somehow be saved and reloaded each session. That way I'm not having to waste precious imaging time.
Rene
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
Topic Author
- Away
- Administrator
-
- Posts: 1221
- Thank you received: 565
Replied by Hy Murveit on topic New Internal Guider Features
You won't get an argument from me on that. I agree that would be very nice, and notice the same every time I image. In fact, once I got this code ported to KStars, that was one of the first questions I emailed Edgar Klenske--the author of this algorithm & code.
Edgar was very helpful throughout my work on this, but he told me that storing and re-using a model would be very tricky to do, it's not just simply storing some numbers and recovering them. I put experimenting with this on my todo-someday list, but may never get to it. Edgar knows what he's talking about, so I trust his estimate, and I really don't understand the guts of his algorithm.
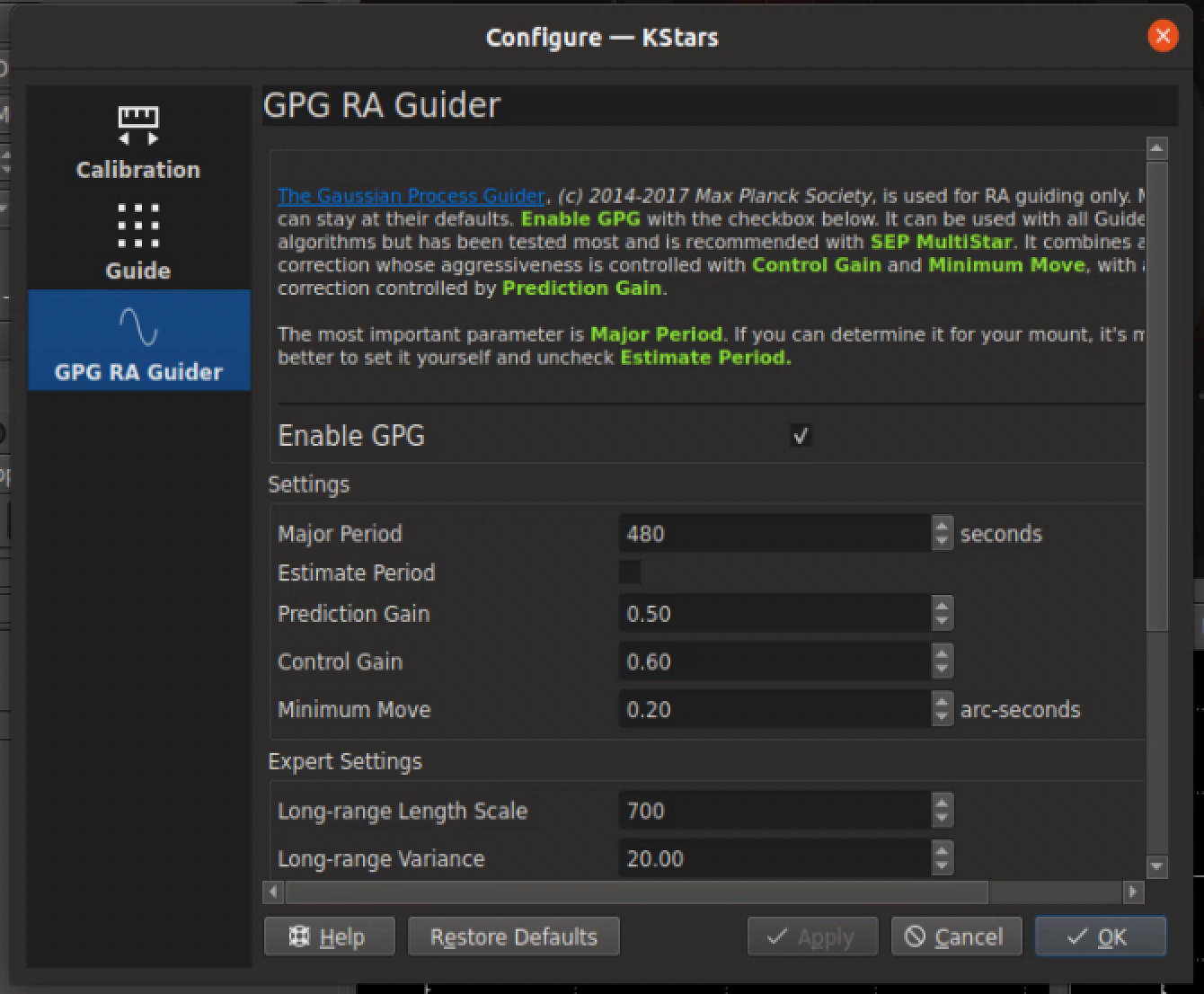
Just checking, though. Of course, you can re-use the Major Period estimate. Once you think your system has done a good job estimating it (or you've looked up) your mount's worm-gear period, there's no reason to re-estimate that every time. Make sure you then uncheck "Estimate Period", and use your known good value for Major Period (e.g. taken from the end of a successful guiding session, or from some publication of your mount's worm-gear period). The default (see Num Periods for Inference") is to completely trust the new estimate after 2 periods, so if your mount period was 8 minutes (and I believe that's about as long as they get, though I'm not sure), then you should be running pretty well after 15 minutes or so, and less for mounts with shorter worm-gear periods, if you don't also have to estimate the mount's period.
Hy
Please Log in or Create an account to join the conversation.
Replied by hades on topic New Internal Guider Features
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
Topic Author
- Away
- Administrator
-
- Posts: 1221
- Thank you received: 565
Replied by Hy Murveit on topic New Internal Guider Features
Please Log in or Create an account to join the conversation.
Replied by hades on topic New Internal Guider Features
Please Log in or Create an account to join the conversation.
- Rafa Barberá
-

- Offline
- Elite Member
-

- Posts: 219
- Thank you received: 41
Replied by Rafa Barberá on topic New Internal Guider Features
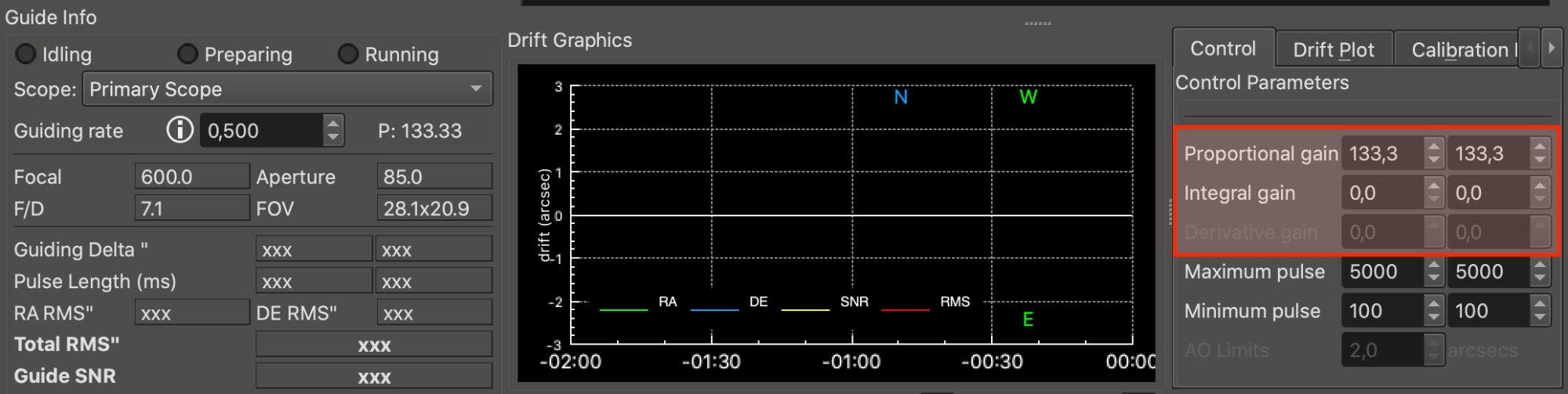
Could it be posible to know the equations that relate both set of parameters? Thanks in advance
Attachments:
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
Topic Author
- Away
- Administrator
-
- Posts: 1221
- Thank you received: 565
Replied by Hy Murveit on topic New Internal Guider Features
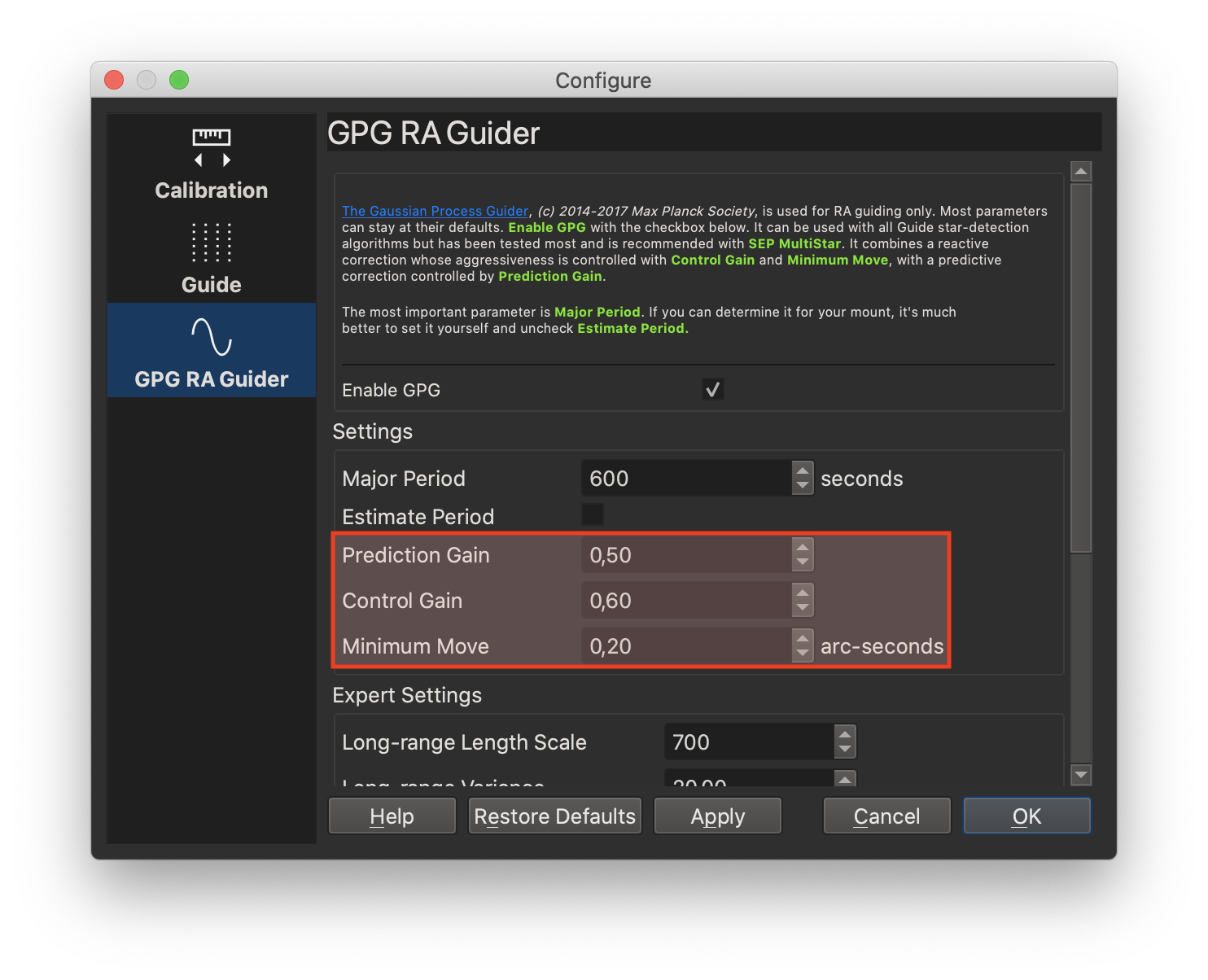
GPG, when enabled, completely controls the response to RA error (but not the DEC error). So, RA Proportional Gain, RA Integral Gain and RA Minimum Pulse from that Control Tab are ignored when GPG is used (the DEC values are used, as GPG is not involved in DEC guiding). It turns out the RA Maximum pulse is used for RA and DEC. Maximum pulse is sort of a safeguard that wasn't implemented in the Klenske's GPG code , and so I kept it in place.
The GPG parameters themselves are a bit tricky. I did not modify them from their original form, and you can see how they're used in the code we got from Max Planck Institute / Edgar Klenske:
invent.kde.org/education/kstars/-/blob/m...cess_guider.cpp#L344
Basically it blend the control error:
line 344:
control_signal_ = parameters.control_gain_ * input;
where input is the arcsecond guiding error in RA, and control_gain_ is that parameter in the GPG RA Guider Menu you showed
and combines it with a predicted error it's learned from its history
lines 363-364:control_signal_ += parameters.prediction_gain_ * prediction_; // add the prediction
Please Log in or Create an account to join the conversation.