INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Internal guider questions
- Peter Sütterlin
-

- Offline
- Supernova Explorer
-

- Posts: 1009
- Thank you received: 133
Replied by Peter Sütterlin on topic Internal guider questions
Please Log in or Create an account to join the conversation.
- Hy Murveit
-

- Offline
- Administrator
-

- Posts: 1220
- Thank you received: 565
Replied by Hy Murveit on topic Internal guider questions
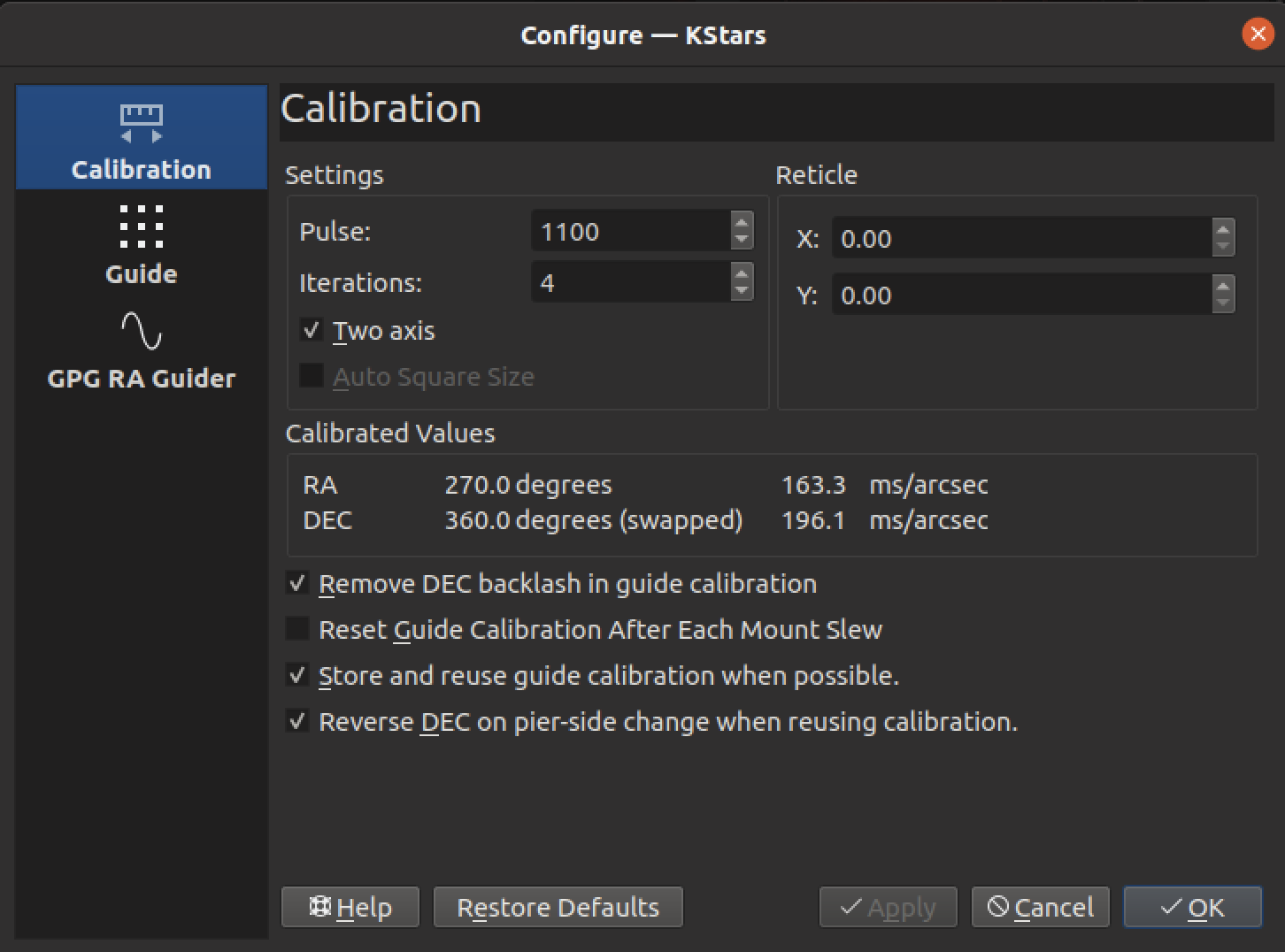
In the above image, you can see that the simulated DEC system was measured at 196 ms/arc-second, so using 133 would be more like 0.68 aggressiveness. That calibrated value for DEC is not actually used anywhere (yet) in the internal guider. (If you use GPG RA guiding, then the RA's value is in fact used in the control system.)
Re the backlash question: the internal guider itself doesn't compensate for backlash at this point. I suppose it's possible some mounts or drivers do that behind the scenes, but I'm not familiar with that.
Hy
Attachments:
Please Log in or Create an account to join the conversation.
- ALESSANDRO PENSATO
-
- Offline
- Elite Member
-

- Posts: 334
- Thank you received: 23
Replied by ALESSANDRO PENSATO on topic Internal guider questions
For example I use a DMK 618mono with @ 1120mm with my RC and OAG, I use a value of 550 and 3 iterations and the only algorithm that seems to complete the calibration is SMART. I do not know why bu more informatin about all the section parameters could be usefully for more users
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
- Offline
- Administrator
-
- Posts: 1220
- Thank you received: 565
Replied by Hy Murveit on topic Internal guider questions
Re your smart-only issue, my recommendation is for you to make sure that SEP star-detection works for your guide camera and guide scope combination (and if not, tweak the star detection parameters in guide so that it does). For instance, switch the align tab to that camera and scope and see if you can get it to solve. Truth be told, the issue is not with the solving itself, but with the star detection front end, which SEP-based guiding algorithms depend on.
Clearly Ekos could use some kind of wizard that helps adjust StellarSolver parameters. Rob’s StellarSolver GitHub comes with a StellarSolver_Tester program with a UI that at least makes adjusting the parameters a little easier, that might be easier to use than the align tab approach if you can get his GitHub program to compile.
Please Log in or Create an account to join the conversation.
- maxthebuilder
-

- Offline
- Platinum Member
-
- Posts: 912
- Thank you received: 86
Replied by maxthebuilder on topic Internal guider questions
I actually never touched the proportional gain values only played with min/max pulse.
It turns out that the proportional gain is maybe even more important.
Will give it a try.
ZWO AM5. RST-135. AZ-GTI. HEQ5. iOptron SkyTracker.
TPO RC6. FRA400. Rokinon 135 and other lenses.
ZWO ASI2600MC. D5500 modified with UVIR clip-in filter.
ZWO ASI120MM Mini x 2. ZWO 30F4 guider. Orion 50mm guider.
ZWO EAF x 3.
Please Log in or Create an account to join the conversation.
- Magnus Larsson
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-
- Posts: 643
- Thank you received: 62
Replied by Magnus Larsson on topic Internal guider questions
I keep adding some issues here, as they surface. First of all, I seem to have the internal guider working nicely most of the time, but I still miss the drift alignment in PHD2.
The issue: at times, like last night, calibration simply fails. Looking at the calibration graph, there is very little (almost no) movement. I have set calibration steps to 1000 ms, using 5 steps or more. So I switch to PHD2, and there calibraion (with similar step size) works flawlessly.
So far, I have no indications of when this happens, just seems random for now (and summer nights are almost here, so little darkness to play in) - do any of you have suggestions for what to look for, what to check? My feeling was last night that the guider failed to move the mount, as if guide rate was off or far to small steps or guide pulses turned off, like in the guiding assistant in PHD2. Since PHD2 worked 3 minutes later, it could hardly be mechanical issue, can it? But as I wrote, guide steps were at 1000 ms and guide rate the usual 0.5.
Any ideas?
Magnus
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
- Offline
- Administrator
-
- Posts: 1220
- Thank you received: 565
Replied by Hy Murveit on topic Internal guider questions
I assume you're using PHD2 through KStars/Indi, so they're using the same Indi mount drivers.
I will note that as I understand it, the PHD2 folks recommend calibrating once and leaving it, e.g. not recalibrating for months, unless you change the guiding imaging setup (e.g. rotate the guide camera, remove it, or something like that). I have taken that to heart, and I personally don't calibrate often either. As you probably know, the internal guider has options to keep use the calibration--e.g. do it once where it works nicely, e.g. near the meridian and the equator, and keep that calibration for a long while instead of recalibrating on every slew.
The calibration scheme simply pulses the mount the amount specified, e.g. 1000ms, every step it takes, without regard for the guide rate, until it sees enough movement. Is it possible you have a lot of backlash, and somehow PHD2 compensates for that better than Ekos? I guess you can measure that with the PHD2 guiding assistant.
Do you have these issues in both RA and DEC?
BTW, now that I think of it, it's also possible that the issue is star detection, not mount movement (e.g. the issue could be improved with improved stellarsolver parameters for guiding). That would be obvious in a log with debugging enabled for guide and fits.
Hy
Please Log in or Create an account to join the conversation.
- Magnus Larsson
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 643
- Thank you received: 62
Replied by Magnus Larsson on topic Internal guider questions
Great, thanks! Yes I use PHD2 through Ekos/Indi, so same driver etc. And I use a Losmandy G11 where there is significant DEC backlash - but not RA. It is compensated in PHD2 with compensation around 800 ms, and PHD2 handles it very nicely. This is one thing I was worried about with the internal guider, but it has not yet been a problem. It could play into calibration - however, the scope did not move in RA either... so something else is at play.
Good thought with star detection! And of course, I did not have logs on... but now I have.
") To adjust the parameters - what to think of there? Is there a good resources somewhere to look at?
To adjust the parameters - what to think of there? Is there a good resources somewhere to look at?I'll try and experiment a bit with this next time clouds part and I am still awake ...
Magnus
Please Log in or Create an account to join the conversation.
- Georgios Lekkas
-

- Offline
- Junior Member
-

- Posts: 30
- Thank you received: 2
Replied by Georgios Lekkas on topic Internal guider questions
Best regards,
George.
Please Log in or Create an account to join the conversation.
- Magnus Larsson
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 643
- Thank you received: 62
Replied by Magnus Larsson on topic Internal guider questions
Unfortunately, George, I have no answer to your question. I have a different problem.
Tonight, me and the internal guider are not friends. Not at all.
I can complete calibration tonight. But after calibration, gudiing is just crazy. RA drifts off, far off. So I recalibrate, no help. Some 4 or 5 times. No improvement. So I slew to another area, wait until it is darker and better SNR. No improvement.
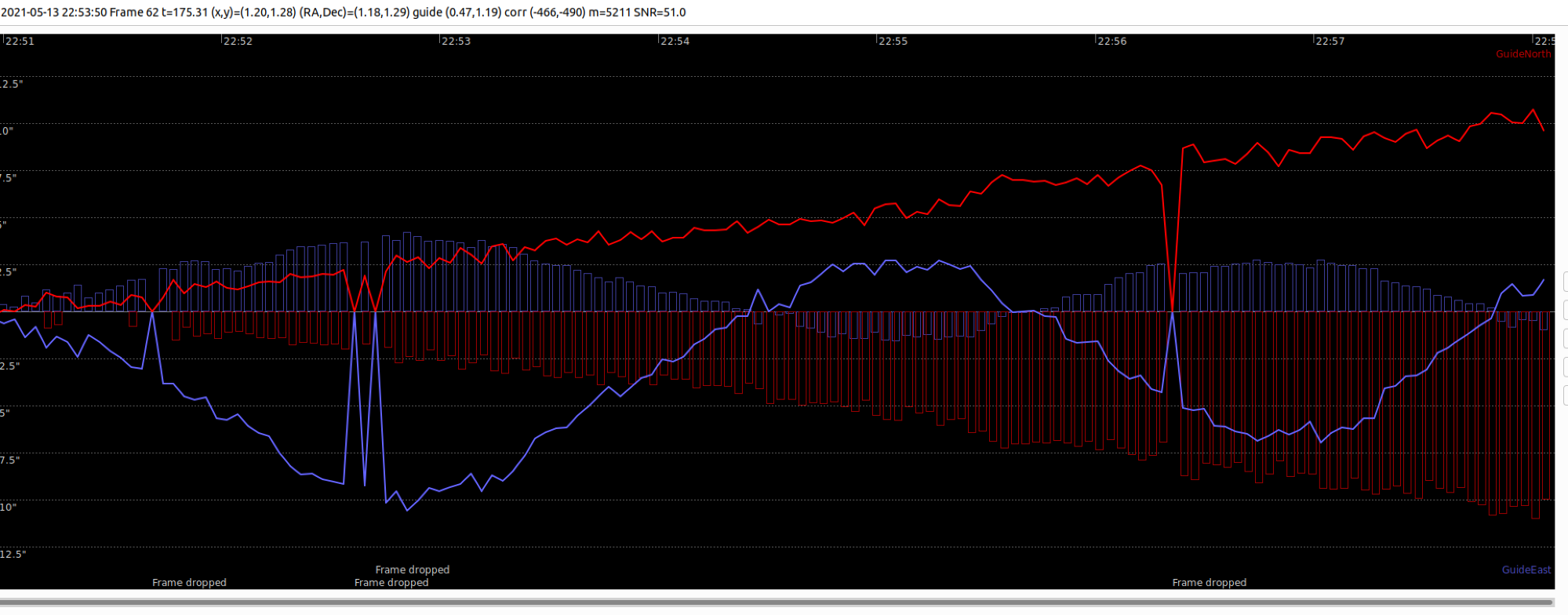
Attached is a guidelog. It looks to me as a Guide Assistant run in PHD2, that is, with no corrections sent to the mount. Kstars log also attached. Anything that makes sense? What did I miss or do wrong?
Directly after this I switched to PHD2. Guiding with RMS 0.54". So it is not a mount issue. And yes, PHD2 runs through Ekos and Indi.
Any ideas?
Magnus
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
- Offline
- Administrator
-
- Posts: 1220
- Thank you received: 565
Replied by Hy Murveit on topic Internal guider questions
Very sorry about the issues you're having, and I appreciate you sending in logs and raising the issue.
I did look through the log, and it looks like the guider is doing what it should, e.g. it measures error and sends out the appropriate pulses to counter the error.
Unfortunately, it looks like the computed pulses are having no effect at all on the mount, as if it was not even connected.
Yes, very similar to what you said "as a Guide Assistant run in PHD2, that is, with no corrections sent to the mount".
In fact if you view the phdlogview output to the file you sent me, you can see that.
I will ask around, but, sorry, I have no idea what could cause the signals from the internal guider to be "not sent to" or "ignored by" the mount.
Hy
Attachments:
Please Log in or Create an account to join the conversation.
- Jasem Mutlaq
-

- Online
- Administrator
-
Replied by Jasem Mutlaq on topic Internal guider questions
Please Log in or Create an account to join the conversation.