INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Update Rainbow Astro RST-135(E) driver to allow syncing of star alignment.
- W J Drijfhout
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

- Posts: 207
- Thank you received: 18
Replied by W J Drijfhout on topic Update Rainbow Astro RST-135(E) driver to allow syncing of star alignment.
Please Log in or Create an account to join the conversation.
- Stephen Wong
-

- Offline
- Premium Member
-

- Posts: 90
- Thank you received: 12
Replied by Stephen Wong on topic Update Rainbow Astro RST-135(E) driver to allow syncing of star alignment.
I'd just need to see what would be the command strings the mount will be accepting.
Stephen
Please Log in or Create an account to join the conversation.
- W J Drijfhout
-
Topic Author
- Offline
- Elite Member
-
- Posts: 207
- Thank you received: 18
Replied by W J Drijfhout on topic Update Rainbow Astro RST-135(E) driver to allow syncing of star alignment.
Please Log in or Create an account to join the conversation.
- W J Drijfhout
-
Topic Author
- Offline
- Elite Member
-
- Posts: 207
- Thank you received: 18
Replied by W J Drijfhout on topic Update Rainbow Astro RST-135(E) driver to allow syncing of star alignment.
Please Log in or Create an account to join the conversation.
- Christopher
-

- Offline
- Junior Member
-

- Posts: 32
- Thank you received: 13
Replied by Christopher on topic Update Rainbow Astro RST-135(E) driver to allow syncing of star alignment.
Stephen pointed out that there's kind of an integrated feature of INDI called "INDI Alignment Subsystem". This is not used in my solution (but is used in the 10micron driver). To be honest, I don't fully understand how this subsystem works or should work. In my understanding this computes a mount model inside of Ekos/INDI, which should be the wrong way to go for Rainbow RST mounts, since they are computing their models inside the RST hardware only based on given star alignment points.
I faced one problem though: There's a random behaviour of RST's hand controller where it crashes. After I sent over the star alignment command the display on the hand controller correctly displays the star alignment but crashes after hitting the "ESC" button on the controller. I have no idea how this is connected. The display gets blank and it needs several seconds for a reboot. The mount's processor itself does obviously not crash though, since its continuously communicating with INDI. Additionally the hand controller shows some stored alignment data after the crash/reboot.
Please Log in or Create an account to join the conversation.
- Stephen Wong
-
- Offline
- Premium Member
-
- Posts: 90
- Thank you received: 12
Replied by Stephen Wong on topic Update Rainbow Astro RST-135(E) driver to allow syncing of star alignment.
Thanks for the advice. I've submitted a pull request so hopefully this would appear in the nightly build soon.
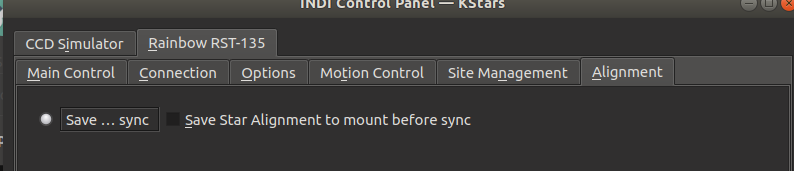
See the screenshot I added the alignment tab, only one checkbox that would allow the alignment data to save to the mount before every sync. Switch it on if you want to send the align command to the mount during the sync operation.
So the most convenient way to build the mount model would be using the "Mount Model Tool" and then perform a set of platesolves (with "sync" as the operation)
And then the alignment points will be saved to the mount at each sync.
I've encounter the same issue at the Hand Controller - the screen became blank after I hit the Esc button. I'm going to send a email to BJ and ask. You can try pressing the ENT (or hold it), or hit the Esc a few times, the default "boot screen" will appear again in the HC. There're no disconnection between the mount, the HC and INDI so it seemed to be just the HC display problem.
For the issuehunt bounty, thank you very much for contributing and I have made my pull request onto it.
After project finish I will donate all the amount back to INDI to support the ongoing development.
Thanks again,
Stephen
Attachments:
Please Log in or Create an account to join the conversation.
- Christopher
-
- Offline
- Junior Member
-
- Posts: 32
- Thank you received: 13
Replied by Christopher on topic Update Rainbow Astro RST-135(E) driver to allow syncing of star alignment.
My plan was to donate any bounty to the INDI project as well – so I'm happy with that.

Edit: Now I managed to push this to my fork (had a broken fork yesterday so I was not able to push the changes): github.com/jimmy-ck/indi/commit/3632287b...d5bbdb7bee22f5ac13d9
Please Log in or Create an account to join the conversation.
- W J Drijfhout
-
Topic Author
- Offline
- Elite Member
-
- Posts: 207
- Thank you received: 18
Replied by W J Drijfhout on topic Update Rainbow Astro RST-135(E) driver to allow syncing of star alignment.
Please Log in or Create an account to join the conversation.
- Christopher
-
- Offline
- Junior Member
-
- Posts: 32
- Thank you received: 13
Replied by Christopher on topic Update Rainbow Astro RST-135(E) driver to allow syncing of star alignment.
Question: Are there some other features missing which are implemented into the ASCOM driver?
Please Log in or Create an account to join the conversation.
- Thomas Mason
-

- Offline
- Elite Member
-
- Posts: 200
- Thank you received: 18
Replied by Thomas Mason on topic Update Rainbow Astro RST-135(E) driver to allow syncing of star alignment.
Please Log in or Create an account to join the conversation.
- Christopher
-
- Offline
- Junior Member
-
- Posts: 32
- Thank you received: 13
Replied by Christopher on topic Update Rainbow Astro RST-135(E) driver to allow syncing of star alignment.
For me the 1 hour offset occured after the recent DST time change as well, but I did not observe any quick jumping on the hand controller. In which menu did you observe this behaviour?
Please Log in or Create an account to join the conversation.
- Stephen Wong
-
- Offline
- Premium Member
-
- Posts: 90
- Thank you received: 12
Replied by Stephen Wong on topic Update Rainbow Astro RST-135(E) driver to allow syncing of star alignment.
And I've sent a email to BJ to mention the blank screen after Esc. Once I received his reply I'll share the updates here.
Jasem, thanks for your review on my codes.
Please Log in or Create an account to join the conversation.