


Kurt,
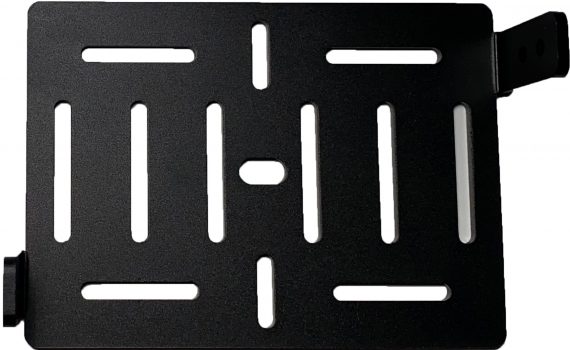
It's the Small Factor Top Plate for PPBADV from Pegasus Astro ( pegasusastro.com/products/mounting-accessories/ ). It mounts directly on the Pocket Power Box Advanced (PPBA) and I only had to drill an extra hole on it to center and match the MELE mounting holes. Works like a charm.
Read More...
As the title says, can we expect a park/unpark functionality in the next release of the ZWO AM5 driver? I looked at the code but it's unfortunately out of my league!
TIA
Read More...
Thanks very much for this info. I'll be 'anxiously'  waiting for the new firmware. I guess that the AM5 Indi driver will also need an update, once the park feature is available with the new firmware.
waiting for the new firmware. I guess that the AM5 Indi driver will also need an update, once the park feature is available with the new firmware.
Looking forward for the new feature.
Read More...
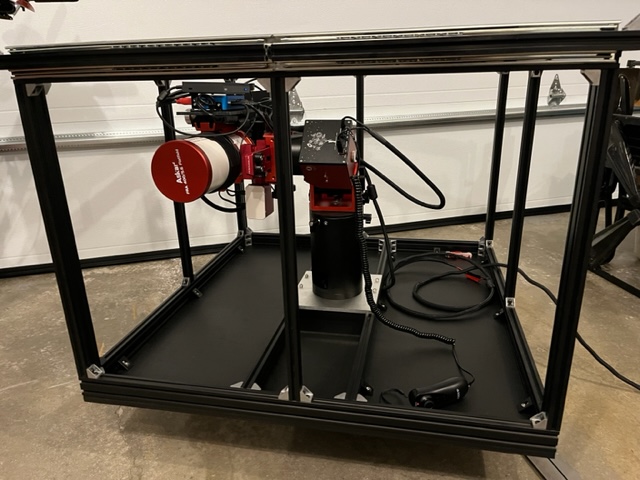
Wondering if there is a plan/possibility that alternate mount parking positions be implemented in Indi.I am building a very small, trunk transportable, observatory, and I would appreciate if the roof could be made low enough for the whole observatory to fit in my car (see attached photos). I can manually park the telescope in a horizontal position and power everything down but the capacity for Indi or EKOS to park automatically is not implemented (yet), from what I understand. Furthermore, ZWO haven't implemented parking capability for that mount yet but I understand they are working on it.Any encouraging insight will be much appreciated. Thanks
Read More...
Running KStars 3.6.4 Stable, on a MeLe PC running Ubuntu 22.04 LTS.
I understand that you are running on a Mac and are using an ASI Mount Controller app (version 1.8.2) that seems to connect to your AM5 mount. That indicates to me that the mount connects to the Mac serial port so I do not see any reason why it should not be found by, and connect to Indi. Do you always connect via the ASI mount controller app or was it a test to see if it would connect to the app? Could it be that the ASI mount controller app does not release the serial port correctly if you disconnect it, and prevents Indi from accessing the serial port? Sorry I don't know the Mac and OSX enough.
Good luck.
Read More...
One of your screen shots show that you are using Serial but also show IP address and port which is strange. Sorry I do not have more suggestions for now. 
Read More...
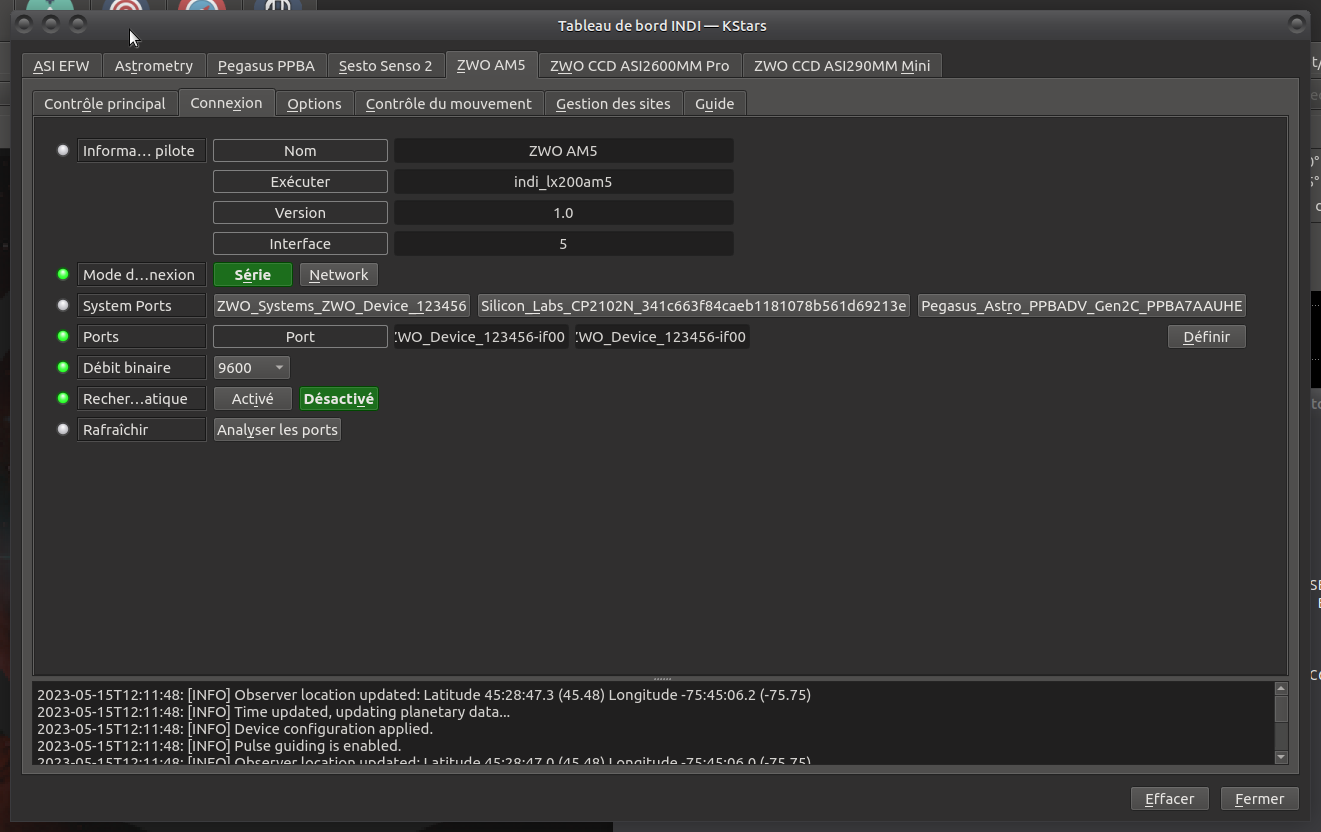
OK, while you try to connect your AM5 with the Indi driver via serial, do you also have the AM5 connected to the ZWO AM5 app via WiFi? That may be the reason why Indi won't connect via serial; dual connection, WiFi with the ZWO app and serial connection via Indi is likely not allowed so you should disconnect the mount from the ZWO AM5 app. Attached is a screenshot of my Indi screen for the ZWO AM5. I do not use the ZWO app nor do I try to connect via WiFi.
Hope this helps.
Read More...
Did you check the USB devices on your system with "lsusb"? You should get something like "Bus 001 Device 008: ID 03c3:4001 ZWO Systems ZWO Device" for the AM5.
On the Indi Control Panel for the ZWO AM5, you should see, among others, the AM5 port "ZWO_Systems_ZWO_Device_..." in the System Ports list and the Port being selected should be ZWO_Systems_ZWO_Device... one. Baud rate on mine is 9600, I have the automatic search enabled also.
Other than that, I am not sure of what it can be.
Read More...
You have your ZWO AM5 set up for Network connection (green) in the Indi Control Panel. Click on the Serial button and then the serial port and baud rate options should be available.
Read More...
Hi John,
As I mentioned in my (edited) previous post, I have just tested with "if HA > 0.0" and things worked, the mount flipped. I would have thought that most, if not all, mounts can go slightly past the Meridian before having to flip but I was wrong with the AM5. It has to be no greater that 0 degree past but exactly 0.
Another lesson learned. ")
Read More...
Hi John,
I had an idea from what you mentioned and tried it but no luck. Instead of flipping if HA > 5 degrees, I thought that I could try flipping the mount if HA > -1 degree, i.e 1 degree before it gets to the Meridian but the wise person who wrote the EKOS Meridian flip trigger did not allow small negative numbers to be used.
My logic behind that was that if one an wait 5 degrees past the Meridian to flip, it should be possible to do a preemptive flip a few degrees before getting to the Meridian with similar results. I could try modifying EKOS to do that but I don't know the code enough to play with it with confidence. I'll look anyway, just in case.
Anyway, I still have to try flipping with the 0 degree condition and see if it works. I will let you know.
Thanks again,
Gilles
Read More...