

Hi,
I want to turn on a power switch in my Pegaus UPB via a startup script. I am doing the following in the command line:
$ indiserver indi_pegasus_upb
$ indi_setprop "Pegasus UPB.CONNECTION.CONNECT=On"
$ indi_setprop "Pegasus UPB.POWER_CONTROL.POWER_CONTROL_4=On"
$ indi_setprop "Pegasus UPB.CONNECTION.CONNECT=Off"
$ pkill indiserver
When I start the Pegasus UPB via EKOS in Kstars, the power switch is NOT turned on. I guess that killing the indiserver makes the UPB turn off that switch again. This does not happen when I start and stop the UPB driver from EKOS within Kstars, even when turning the switch on via indi_setprop in the command line.
Any ideas what I could do to make the UPB keep that power switch in the On-state?
Simon
Read More...
Hi Steve,
I am using vnc viewer, which works great. Had the same problem before: www.realvnc.com/en/connect/download/viewer/
Hope this works for you
Simon
Read More...
Hi Jasem, hi startup script folks,
after quite a while, I am back at my startup script issues. When I start the indi_pegasus_upb driver in Ekos, I can switch Power Ports on and off with
indi_setprop "Pegasus UPB.POWER_CONTROL.POWER_CONTROL_1=On"
from the command line.
When I start indi_pegasus_upb driver via command line
indiserver indi_pegasus_upb
I can't manipulate the Power switches. Is there anything else I need to do besides starting the indi_pegaus_upb driver using the indiserver command?
Another question I have is, if it is possible to stop the indiserver in the startup script, so that the scheduler can start the proper profile with all the drivers, after I turn on my equipment via startup script.
Thanks for any help
Simon
Read More...
Ok, I found a workaround I would like to share for anyone who is having the same problem. I just hooked both servos up to the same PWM pin on the Arduino. Only downside is that I can't open the caps individually, but that's okay.
Simon
Read More...
Thanks for the quick reply, Jasem. Would be possible to run two different dust cap drivers now, like "Arduino Dust Cap" and "INDI Servoblaster Cap"? How would the scheduler handle this?
Simon
Read More...
Hi,
we have set up a remote observatory at my school (www.indilib.org/forum/ekos/8541-power-an...-startup-script.html) which is run by Ekos scheduler. We are using Arduino Cap to drive dust caps with servos. We have constructed two dust caps, one for the guide scope and one for the main telescope. I thought that I could add two Arduino Cap drivers to my profile (Aux1 and Aux2). However, once I have selected that drive under Aux1, it is no longer available under Aux2.
1) Is there a workaround to use two Dust Caps?
2) If so, will the scheduler open both caps when the uncap option is checked?
Thanks for any help
Simon
Read More...
Hi Vin,
I am sorry I couldn‘t be of more help. Maybe I have a different revision of the EFW2. I hope you don‘t have much trouble to trade the EFW2 for the SX filter wheel.
Simon
Read More...
Hi Vin,
at the moment I am running KStars 3.4.3 (I had to downgrade from 3.5.2 because the indi_usbrelay2_roof driver kept crashing). I took a screenshot to show you the driver version I am running. The EFW2 also worked with later versions of KStars, i.e. 3.5.2.
Are you running Windows or Linux on your laptop?
Simon
Read More...
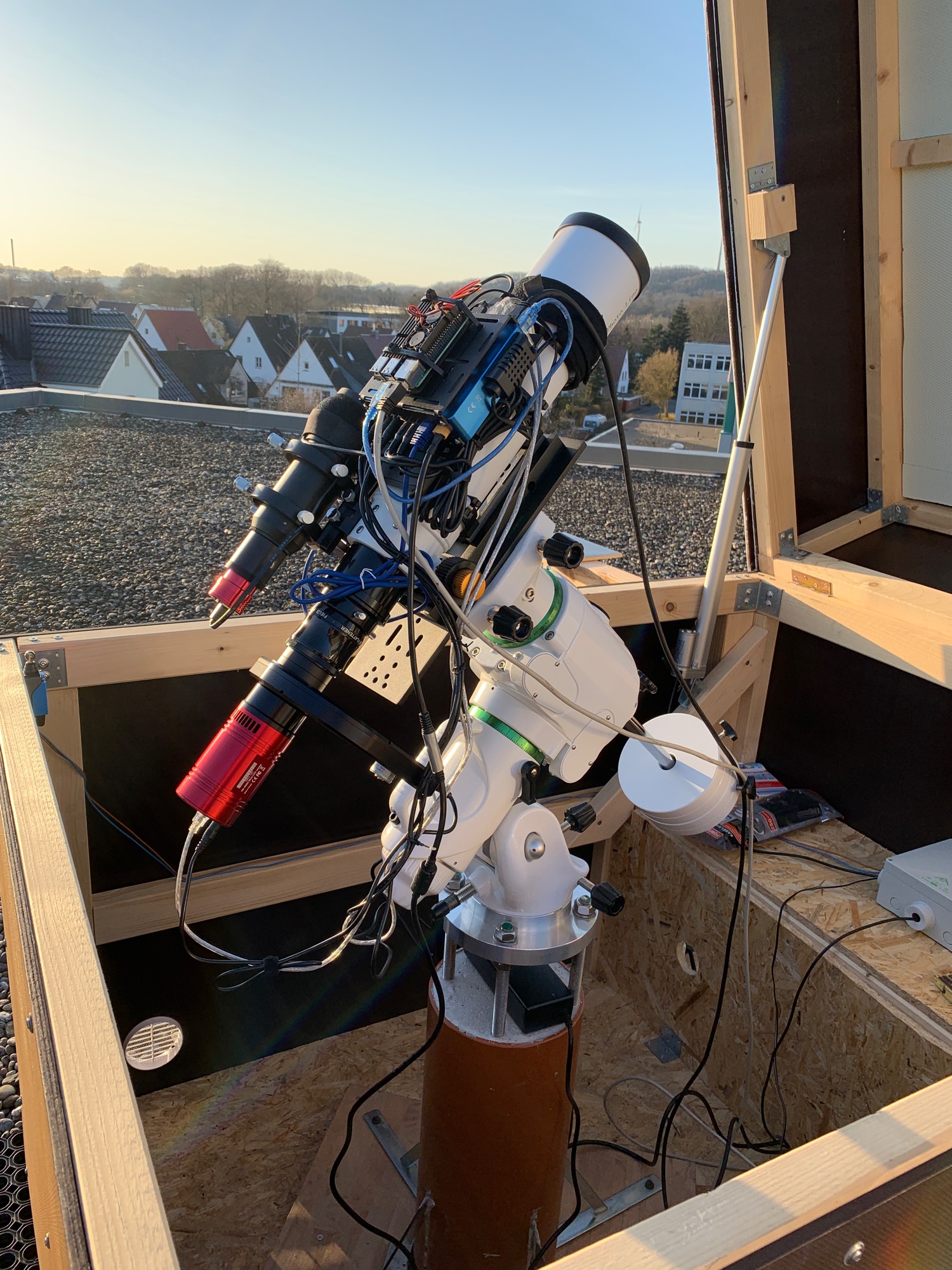
Hi Vin,
I am using the EFW2 with KStars/Ekos on a Raspberry Pi 4 running Astroberry Server 2.0.3. The EFW2 is USB connected via a Pegasus Ultimate Power Box (UPB) v2. The 12V power for the EFW2 also comes from the UPB. The filter wheel has run flawlessly from the first connection through different versions of KStars (staring from 3.4.3).
I did have some problem with the filter wheel included in the Atik 6.0 and older Atik INDI driver versions. In that case the wheel was spinning and never stopped. That problem could temporarily be solved by purging the config file. Later versions of the Atik INDI driver did somehow solve the issue.
I never had a connection problem with the Atik filter wheels.
I don't know, if that was any help to you. Maybe you could check, if any other device is blocking the USB connection the EFW2 is trying to establish. I think I had that problem with some INDI device before.
Good luck with connecting that EFW2. smile.png
Simon
P.S.: A pic of the setup is in the attachments.
Read More...
Hi,
I today realized that my Pegasus Ultimate Powerbox v2 won't connect to Ekos showing a "INDI driver Pegasus UPB crashed." notice. It worked previously flawlessly and I can't remember that I changed anything. I attached a log file and hope that anyone can give me a clue what's wrong and what I can do to solve the issue. I am running KStars 3.5.2 Stable on an Astroberry Raspberry Pi 4.
Simon
Read More...
Ok, I wasn‘t aware of the difference between the Telescope Simulator and the EqMod driver. Thanks for making this clear.
Simon
Read More...