


Great update it has arrived...
Has it? I didn't receive any notification and your post prompted me to take a look, but I can find zero changelog or even a date of release for whatever version is currently available to download. Was there a post somewhere announcing an updated release?
I constantly feel like such a moron on this.
Read More...
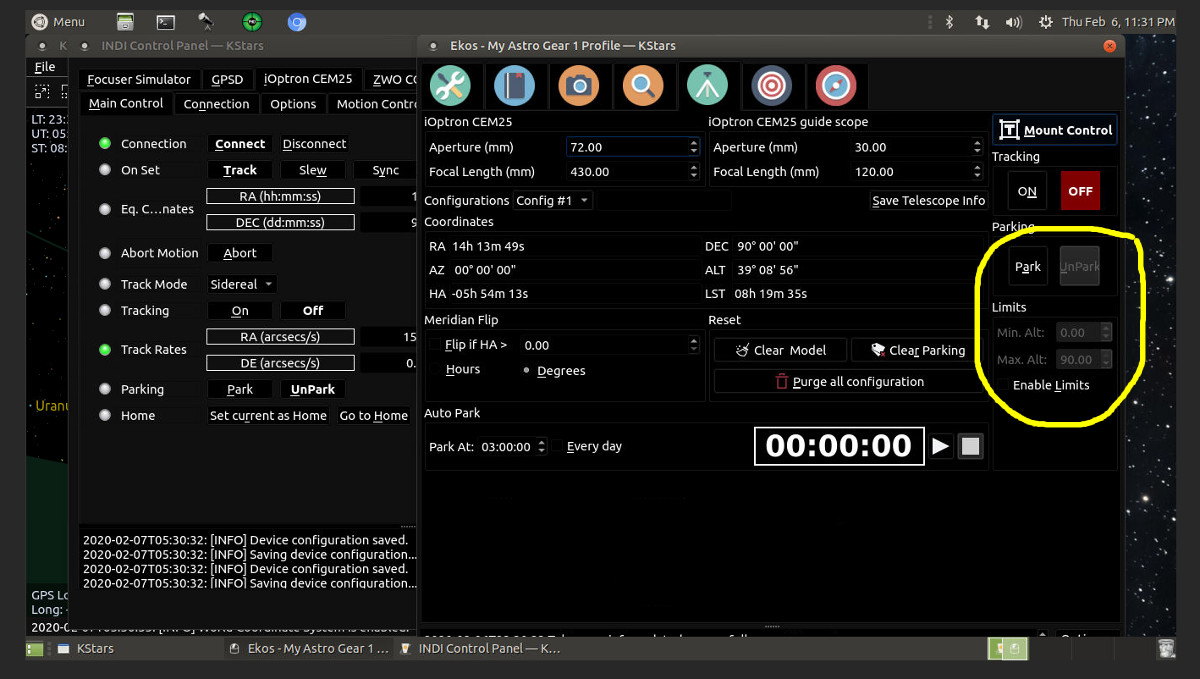
The limits being talked about here are altitude limits
D'oh! Well that makes sense.
Regarding "park" I guess the negative I can think of is what I've experienced with mine, that being:
since "Park" is a prominent option, i.e. a button for it exists in more than one location... if you can't set up some mounts to park, then the existence of the button is worse than useless because accidentally pressing it sends the mount moving to some position (which seems random on my mount).
In my case, that "random" position has, 50% of the time, been such that it will crash the mount unless I intervene to stop it. Obviously, if a guy wanted to set up his rig to remotely control it, then an accidental sending of a "park" command is a significant problem.
If some mounts can't "park", then maybe having an option to select whether or not you want the buttons to be present at all on the controller screens or not would be a good thing? In the case of these types of mounts, at best it's a dead button, at worst accidental pressing of a button you can never use but is always present can possibly damage a mount.
In other words, in my case (and others), since my mount apparently can't park at all, if I could make the button disappear altogether on the control screens (or be grayed out and non-functional or whatever), then that could very well protect a guy's equipment from being damaged. Seems like a pretty good idea.
Read More...
Hi folks.
I have an Ioptron CEM25P mount and it has GPS built in to it. Ekos connects to the mount just fine and it syncs to the coordinates and motion control appears to work just fine. I'm really happy with all that actually.
But Ekos doesn't seem to automatically pick up the GPS from the mount. I ended up getting a GPS dongle because I can use that in a different project anyway. The dongle works fine and is automatic since I picked the GPSD driver in the configuration. But it would be a more tidy setup if Ekos could connect to the mount's GPS instead. Seems silly to have a redundant GPS module if I don't have to.
Is there anything special I need to do to enable the mount's GPS rather than the dongle?
Sorry if this is a dumb question. The answer is probably something stupid simple, but I'm just that kind of idiot not be able to figure it out. Thanks for any help.
Read More...
Hi. Apologies if this is too noob to be appropriate here, but seems like it might be an important thing to focus on for getting started, i.e. not "crashing" your mount is probably a good idea right at the beginning.
I see a parameter for setting a limit so you don't crash your drive, but it's not intuitive I guess because I can't figure out what numbers should be entered. There are a lot of coordinate possibilities on that same page, but none of them correspond to the "Min Alt." or "Max Alt." values that show on the page. Or at least it's not connecting in my mind. They are hours & minutes instead of degrees to start with, so I don't think I'm looking in the correct place.
I figure I'd want to set the home position to essentially where the telescope points at the CP and the scope/weight axis vertical so I did that first. Then I swung the mount to either side close to where I want the limit to be and wrote down all the coordinate values from the left side of the mount tab. The HA is the only thing that changes but the numbers don't make sense to me. Can anybody help me here?
Kind of related but maybe on a tangent, I'd like the "Park" position to just be the same as the home position and I set that to happen once, but I was just poking at it and it was a bit of an accident really. But every time I restart the Pi, the park position is somewhere completely else and clicking "Park" always moves the telescope around such that I have to manually abort otherwise it will crash the mount into the base, which is kind of the exact opposite of what I'd want "Park" to do.
Anyways, getting this set up to control my mount remotely without the fear that it could crash and start stripping gears seems like an important first step I'd like to safely configure really early in the process. I seem to be getting nowhere with it, so any guidance would be appreciated.
I've attached a pic of the screen I'm thinking I need to set this. Maybe I'm not even in the correct place?
Read More...
Well that was a very quick reply!
Thanks. I'll keep poking at it. I really like the whole concept so congrats on your work on this. I figured I could just work with Astroberry but I like what you're doing and figured it wouldn't hurt to support you a little by purchasing the OS. After printing the Stellarmate manual today and punching holes to put it in a binder, It occurred to me how much work that manual alone must have taken to put together. It's very thick even printed on both sides.
Read More...
I'm having pretty much the same problem with my new Stellarmate OS install with my tablet. The shame is when I first installed everything (Stellarmate OS and the tablet app) it connected OK. It only started resisting me the second time starting it up and I haven't found any love at all ever since.
This might be a problem with my ignorance or it could be a problem with bugs. But if it's a problem on my end, that indicates that being able to simply connect and use the thing is NOT intuitive. If you need to be a computer whiz just to use it, then it's not going to enjoy much success I fear. It's unfortunate since I really like the potential.
Read More...