×
INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Guiding calibration failures
- Bill Tschumy
-
 Topic Author
Topic Author
- Offline
- Premium Member
-

- Posts: 102
- Thank you received: 11
Guiding calibration failures was created by Bill Tschumy
I am just learning about auto-guiding. Last night I was getting messages like:
2023-04-06T20:34:41 Guide DEC: Scope cannot reach the start point after 21 iterations.
Possible mount or backlash problems...
2023-04-06T20:33:20 DEC drifting reverse...
2023-04-06T20:33:01 DEC drifting forward...
2023-04-06T20:32:45 DEC backlash...
2023-04-06T20:32:32 RA drifting reverse...
2023-04-06T20:32:20 RA drifting forward...
2023-04-06T20:32:20 Calibration started.
2023-04-06T20:32:20 Auto star selected.
I found that I needed to increase the Calibration Pulse to 2000 to get calibration to consistently work. I feel this is higher than most people/mounts need. I don't think I have a large backlash problem in Dec. I feel only minuscule movement (if any) when wobbling the Dec axis by hand.
It looks like the RA drifting takes around 12 second for each direction. The Dec forward take at least twice that long and the reverse even longer (when it finishes correctly). What does this indicate? What is normal?
I also have no idea what is going on during these "drifting forward" or "drifting backward" periods. What is the mount actually doing here?
Thanks,
Bill
2023-04-06T20:34:41 Guide DEC: Scope cannot reach the start point after 21 iterations.
Possible mount or backlash problems...
2023-04-06T20:33:20 DEC drifting reverse...
2023-04-06T20:33:01 DEC drifting forward...
2023-04-06T20:32:45 DEC backlash...
2023-04-06T20:32:32 RA drifting reverse...
2023-04-06T20:32:20 RA drifting forward...
2023-04-06T20:32:20 Calibration started.
2023-04-06T20:32:20 Auto star selected.
I found that I needed to increase the Calibration Pulse to 2000 to get calibration to consistently work. I feel this is higher than most people/mounts need. I don't think I have a large backlash problem in Dec. I feel only minuscule movement (if any) when wobbling the Dec axis by hand.
It looks like the RA drifting takes around 12 second for each direction. The Dec forward take at least twice that long and the reverse even longer (when it finishes correctly). What does this indicate? What is normal?
I also have no idea what is going on during these "drifting forward" or "drifting backward" periods. What is the mount actually doing here?
Thanks,
Bill
1 year 3 weeks ago
#91776
Please Log in or Create an account to join the conversation.
- Hy Murveit
-

- Away
- Administrator
-

- Posts: 1224
- Thank you received: 566
Replied by Hy Murveit on topic Guiding calibration failures
Bill,
Where are you pointed when you are calibrating? If it's near the pole, then that's the issue. Guiding, and certainly calibraton, doesn't work well near the poles.
There is a lot of web wisdom on the best way to calibrate for guiding. Usually it boils down to pointing somewhere near the meridian and equator (I usually go on the west side so it doesn't accidentally meridian flip). I'd allow it to take 10 steps or so, and use a pulse size that gets you a couple pixels per step. Once you have a good calibration, set the options such that Ekos remembers the calibration (as opposed to re-calibrating every time you guide). If you do this, you don't need to recalibrate until you remove or rotate the guide camera.
There is one option you need to know that is mount specific--"Reverse DEC on pier side change, when re-using calibration". If you can't find out what it should be for your mount, the way you figure it out is (a) calibrate, (b) test your guiding for a couple minutes near where you calibrated, (c) move to a similar position on the other side of the meridian and guide there. If you have it wrong, then DEC will "run-away".
Hy
Below are the Ekos guider calibration options I use with my AP1100 mount.
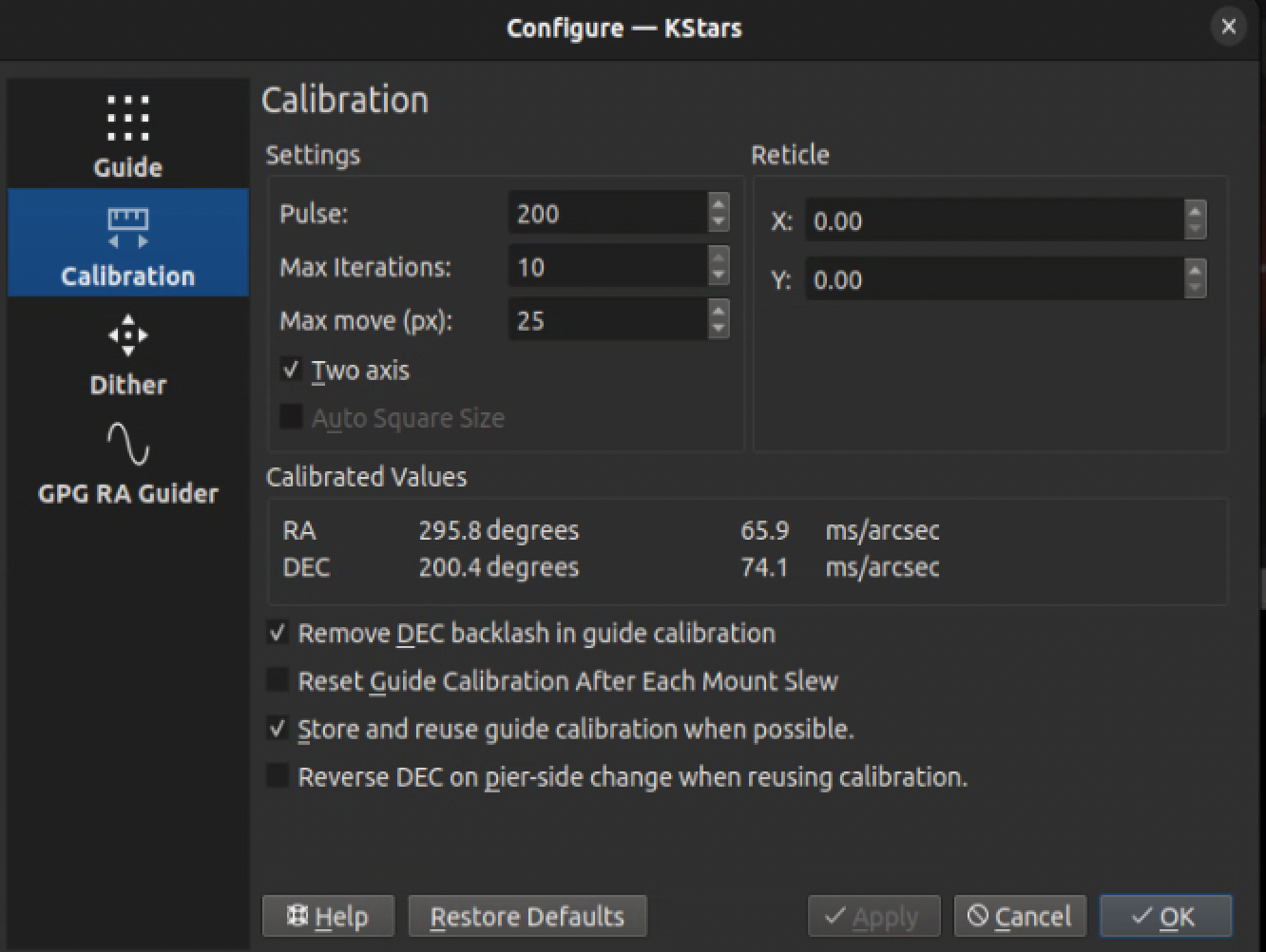
Where are you pointed when you are calibrating? If it's near the pole, then that's the issue. Guiding, and certainly calibraton, doesn't work well near the poles.
There is a lot of web wisdom on the best way to calibrate for guiding. Usually it boils down to pointing somewhere near the meridian and equator (I usually go on the west side so it doesn't accidentally meridian flip). I'd allow it to take 10 steps or so, and use a pulse size that gets you a couple pixels per step. Once you have a good calibration, set the options such that Ekos remembers the calibration (as opposed to re-calibrating every time you guide). If you do this, you don't need to recalibrate until you remove or rotate the guide camera.
There is one option you need to know that is mount specific--"Reverse DEC on pier side change, when re-using calibration". If you can't find out what it should be for your mount, the way you figure it out is (a) calibrate, (b) test your guiding for a couple minutes near where you calibrated, (c) move to a similar position on the other side of the meridian and guide there. If you have it wrong, then DEC will "run-away".
Hy
Below are the Ekos guider calibration options I use with my AP1100 mount.
1 year 2 weeks ago
#91792
Attachments:
Please Log in or Create an account to join the conversation.
- Bill Tschumy
-
Topic Author
- Offline
- Premium Member
-
- Posts: 102
- Thank you received: 11
Replied by Bill Tschumy on topic Guiding calibration failures
Hy,
Thanks for responding. I'm always well away from the pole when calibrating. The last couple of times I've been maybe 60º Alt and 45º Az (i.e. high in the NE). I can certainly try near the meridian and celestial equator to see if it makes a difference.
I don't understand "use a pulse size that gets you a couple pixels per step". How do I determine that? As I mentioned, if I didn't set the pulse size to around 2000, I'd get
Guide DEC: Scope cannot reach the start point after 21 iterations.
Possible mount or backlash problems...
I'm not even sure what is meant by the number of "steps". Can you briefly explain what is going on during calibration?
1. How are the steps used?
2. Want units is the "pulse size" in?
3. What is happening during the "drifting forwards..." and "drifting reverse..." phases?
You say: "you don't need to recalibrate until you remove or rotate the guide camera". I was told by the INDIGO folks that you should recalibrate every time the point moves more than 10º away from the previous calibration. Your advice is very different. The other night I did move maybe 20º away (but on the same side of the meridian). And my guiding was significantly worse into I recalibrated.
I will experiment with the "Reverse Dec on pier side change" as you suggest.
About how long should you expect the calibration to take? It seems to take around 2-3 minutes for me.
Appreciate the help,
Bill
Thanks for responding. I'm always well away from the pole when calibrating. The last couple of times I've been maybe 60º Alt and 45º Az (i.e. high in the NE). I can certainly try near the meridian and celestial equator to see if it makes a difference.
I don't understand "use a pulse size that gets you a couple pixels per step". How do I determine that? As I mentioned, if I didn't set the pulse size to around 2000, I'd get
Guide DEC: Scope cannot reach the start point after 21 iterations.
Possible mount or backlash problems...
I'm not even sure what is meant by the number of "steps". Can you briefly explain what is going on during calibration?
1. How are the steps used?
2. Want units is the "pulse size" in?
3. What is happening during the "drifting forwards..." and "drifting reverse..." phases?
You say: "you don't need to recalibrate until you remove or rotate the guide camera". I was told by the INDIGO folks that you should recalibrate every time the point moves more than 10º away from the previous calibration. Your advice is very different. The other night I did move maybe 20º away (but on the same side of the meridian). And my guiding was significantly worse into I recalibrated.
I will experiment with the "Reverse Dec on pier side change" as you suggest.
About how long should you expect the calibration to take? It seems to take around 2-3 minutes for me.
Appreciate the help,
Bill
1 year 2 weeks ago
#91806
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
- Away
- Administrator
-
- Posts: 1224
- Thank you received: 566
Replied by Hy Murveit on topic Guiding calibration failures
Here's a quick summary. First remember what guiding does. The guiding system captures an image and finds the (subpixel) position of a particular star it knows about (or does similar things with a set of stars). It then tries to nudge the mount so that that the next it captures an image, that star (or set of stars) will move close to some previously found "special position". The position is found in camera coordinates, i.e. an image x,y position. However, the controls it has at its disposal are (RA and DEC) motor movements. In order to do its job, the guider needs to know which direction in camera coordinates the RA (and DEC) motor will move the image when it "nudges them". It also needs to know how far in that direction the image will move for a given "nudge". Calibration determines the directions and the amount of movement when the motors are nudged.
Now to be more specific, the motors are nudged by pulsing them for a certain number of milliseconds. (One can also send a signal to tell the motor which whether to turn forward or reverse). So, the pulse parameter you were asking about is in milliseconds. If you look at the calibration menu after a successful calibration you will see the parameters that were estimated. Here's a screenshot from part of the guider's calibration menu on my telescope computer right now.
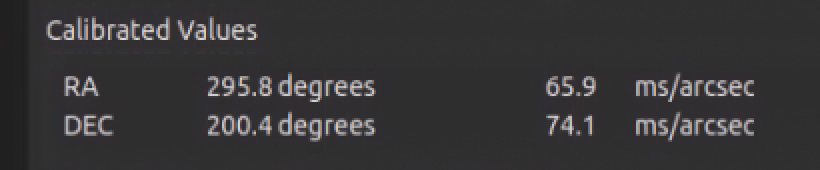
You can see the direction (relative to the guide camera's image) for forward movements in RA and DEC, and you can see that 65.9ms of an RA pulse is expected to move an image 1 arcsecond -- which could be converted to pixels, since the system knows the arcseconds/pixel given the pixel size and focal length. These pulses for RA are on top of the constant tracking movements.
Now, in order to estimate these angles and ms/arcsecond values, the system runs a calibration procedure. It notes the initial position. It then pulses N times. In my case (see image below) it pulses the RA in the positive direction 10 times and notes how far it has gone in pixels and in what direction. (Note, it it moves more than 25 pixels, using the parameters I have, it will end early without finishing 10 steps.) That is the RA-out phase. From this movement it estimates the RA angle and ms/arcseconds. It pulses in the opposite direction to return the image to near the original position. We don't estimate anything from this RA-in phase. It then pulses the DEC motor a few times to remove backlash, and then begins an DEC-out phase, where it similarly estimates the DEC motor's RA and ms/arcsecond parameters. Again it reverses just to get back to the original position, without estimating anything in the DEC-in phase.
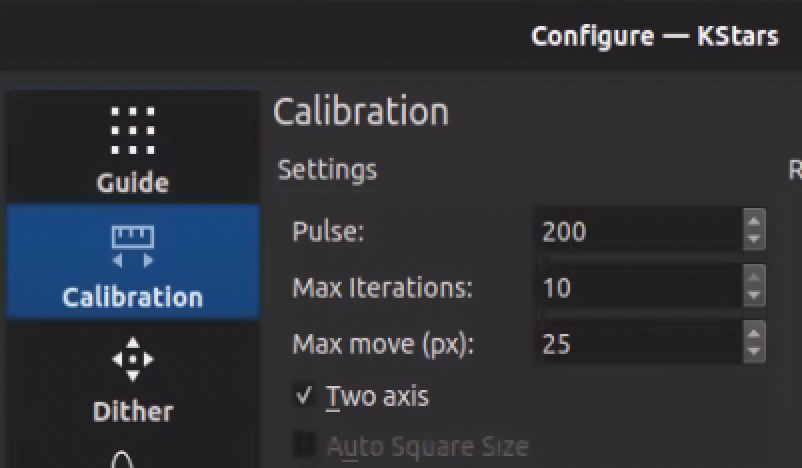
So, I use 10 steps, and the pulse size I use is 200ms. I've explained the RA-in and RA-out phases.
I would say calibration for me takes 2-3 minutes too. The way I do things, calibration is done rarely and its values are used frequently so it's OK to spend a bit of time getting a good calibration since it will be re-used frequently.
Note, if you rotate your guide camera after calibration, then the calibration angles will be wrong.
I am not familiar with indigo, but it is common advice to calibrate once and keep it for a while. For instance, you can probably find some PHD2 guiding tutorials online.
Best,
Hy
Now to be more specific, the motors are nudged by pulsing them for a certain number of milliseconds. (One can also send a signal to tell the motor which whether to turn forward or reverse). So, the pulse parameter you were asking about is in milliseconds. If you look at the calibration menu after a successful calibration you will see the parameters that were estimated. Here's a screenshot from part of the guider's calibration menu on my telescope computer right now.
You can see the direction (relative to the guide camera's image) for forward movements in RA and DEC, and you can see that 65.9ms of an RA pulse is expected to move an image 1 arcsecond -- which could be converted to pixels, since the system knows the arcseconds/pixel given the pixel size and focal length. These pulses for RA are on top of the constant tracking movements.
Now, in order to estimate these angles and ms/arcsecond values, the system runs a calibration procedure. It notes the initial position. It then pulses N times. In my case (see image below) it pulses the RA in the positive direction 10 times and notes how far it has gone in pixels and in what direction. (Note, it it moves more than 25 pixels, using the parameters I have, it will end early without finishing 10 steps.) That is the RA-out phase. From this movement it estimates the RA angle and ms/arcseconds. It pulses in the opposite direction to return the image to near the original position. We don't estimate anything from this RA-in phase. It then pulses the DEC motor a few times to remove backlash, and then begins an DEC-out phase, where it similarly estimates the DEC motor's RA and ms/arcsecond parameters. Again it reverses just to get back to the original position, without estimating anything in the DEC-in phase.
So, I use 10 steps, and the pulse size I use is 200ms. I've explained the RA-in and RA-out phases.
I would say calibration for me takes 2-3 minutes too. The way I do things, calibration is done rarely and its values are used frequently so it's OK to spend a bit of time getting a good calibration since it will be re-used frequently.
Note, if you rotate your guide camera after calibration, then the calibration angles will be wrong.
I am not familiar with indigo, but it is common advice to calibrate once and keep it for a while. For instance, you can probably find some PHD2 guiding tutorials online.
Best,
Hy
1 year 2 weeks ago
#91807
Attachments:
Please Log in or Create an account to join the conversation.
- Thomas Stibor
-

- Offline
- Premium Member
-
- Posts: 111
- Thank you received: 41
Replied by Thomas Stibor on topic Guiding calibration failures
The authors of PHD2 (Bruce Waddington and Andy Galasso) have a presentation on PHD2 Best Practices
see: PHD2 Best Practices
On slide 9 and 10 is written:
So the common wisdom is to keep the calibration and re-calibrate only when e.g. rotating the guiding camera....
see: PHD2 Best Practices
On slide 9 and 10 is written:
- Get a good calibration, then re-use it
- Re-do calibration only when necessary
- Equipment change in existing profile (don’t do this –
use a separate profile instead) - Change in mount guide speed settings
- Rotation of guide camera or OAG by more than a few degrees
So the common wisdom is to keep the calibration and re-calibrate only when e.g. rotating the guiding camera....
1 year 2 weeks ago
#91808
Please Log in or Create an account to join the conversation.
- Bill Tschumy
-
Topic Author
- Offline
- Premium Member
-
- Posts: 102
- Thank you received: 11
Replied by Bill Tschumy on topic Guiding calibration failures
Thomas,
Good stuff. Thanks for pointing me to the document.
Good stuff. Thanks for pointing me to the document.
1 year 2 weeks ago
#91811
Please Log in or Create an account to join the conversation.
- Bill Tschumy
-
Topic Author
- Offline
- Premium Member
-
- Posts: 102
- Thank you received: 11
Replied by Bill Tschumy on topic Guiding calibration failures
Hy,
Thanks so much for that detailed explanation. It helps a lot.
Bill
Thanks so much for that detailed explanation. It helps a lot.
Bill
1 year 2 weeks ago
#91813
Please Log in or Create an account to join the conversation.
Time to create page: 0.224 seconds
© 2003-2022 by INDI Library. All rights reserved.