Does your 3D Printer have a Marlin mainboard, such as in an Ender series? If so, ensure the firmware file has a unique name to any firmwares previously loaded. A Timestamp filename system is the best way to avoid the issue.
A GPS is never necessary for the operation of Stellarmate. You can set your time and position by hand more accurately than you can with a dongle GPS.
Here's what a GPS really looks like (taken from a stratum 1 timeserver):
Notice that GPS reports a course and speed. Recall that this server hasn't moved so much as a millimeter in a month. The receiver averages the time variation to create a "cooked TPV" , however it has to have a PPS tied to it to get the start of second. So the time is going to be off >= a half second on each time pushed to GPSD. The location can't be averaged however, since the course and heading values are used for navigation, and need to be real time. Software using the location data should use a regression to average the value into a true course approximation, or just average the values over a period of time to get the true location (which will not be precise, but within the 10m radius error bubble of the receiver.
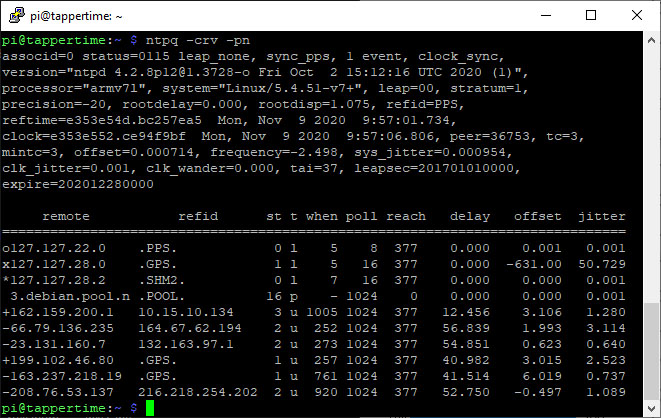
NTP can fix the time issue by using the PPS signal. Here's what they look like:

Here you can see the time derived from the PPS + GPS listed as ".PPS."
The GPS alone, is listed as ".GPS." (The GPS entries lower down are actually the PPS or SHM clocks at other sites)
Notice the huge offset on the GPS time, along with a massive jitter value. This means, that the time received differs from the correct time by 631ms (.631 seconds) and the reported time varies by 51 milliseconds around that offset on every (once per second) transmit from the GPS. That's a lot of error. Notice that the PPS condition time barely varies at all - .001ms or 1 microsecond. The actual value is a bit less than that.
It is a fact, that using a dongle is less accurate than using google earth to set your location/time by hand. Sorry you wasted your money.
×
INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Why you should use a GPS dongle.
- Elias Erdnuess
-

- Offline
- New Member
-

- Posts: 8
- Thank you received: 6
Replied by Elias Erdnuess on topic Why you shouldn't use a GPS dongle.
Hi jabian,
In the GPS NEMA driver, there is a refresh parameter that tells the driver how often to refresh. If you set it to 0 (zero), then the driver won't refresh the position and time from the nema source again.
In the GPS NEMA driver, there is a refresh parameter that tells the driver how often to refresh. If you set it to 0 (zero), then the driver won't refresh the position and time from the nema source again.
The following user(s) said Thank You: Joaquin, Brian Davis
3 years 5 months ago
#62404
The topic has been locked.
- John Robison
-
- Offline
- Elite Member
-

- Posts: 389
- Thank you received: 15
Replied by John Robison on topic Why you should use a GPS dongle.
Hello,
Why you should use a GPS dongle: GPS is a wonderful addition to mounts which do not have an integrated GPS solution. What does a GPS provide?
1. Location
2. Time zone
3. Elevation
4. Relative Time.
KSTARS has EKOS. Wiithin EKOS, INDI can be configured to be dependent on GPSD. I used the GPS to set the postion and time zone of the session. KSTARS needs both to setup the star catalogs and the position of Polaris and other important celestial objects. Having the location allows KSTARS to point to objects relative to the location. When GPSD is not working, Warsaw Poland is its default location.
So, Yes. A GPSD is necessary when not connected to NTP over the internet. GPSD is better when a RTC device is not installed. Even with an RTC, location is important.
Why you should use a GPS dongle: GPS is a wonderful addition to mounts which do not have an integrated GPS solution. What does a GPS provide?
1. Location
2. Time zone
3. Elevation
4. Relative Time.
KSTARS has EKOS. Wiithin EKOS, INDI can be configured to be dependent on GPSD. I used the GPS to set the postion and time zone of the session. KSTARS needs both to setup the star catalogs and the position of Polaris and other important celestial objects. Having the location allows KSTARS to point to objects relative to the location. When GPSD is not working, Warsaw Poland is its default location.
So, Yes. A GPSD is necessary when not connected to NTP over the internet. GPSD is better when a RTC device is not installed. Even with an RTC, location is important.
3 years 5 months ago
#62407
The topic has been locked.

Replied by Joaquin on topic Why you shouldn't use a GPS dongle.
Thanks, great, I suppose GPSD works in the same way as NMEA in this respect.
As per the documentation , one of the differences between these two drivers is that GPSD also sets the operating system time while NMEA do not.
However, in my test Raspi, using the GPSD driver with Stellarmate, I get INDI /EKOS / KStars updated with the GPS data, but operating system time is not synced.
Is this some kind of bug or there something I must do to sync also the system time ?
My test Raspi has not hardware clock. Not sure this can be related with the problem. I did not test it yet with the Raspi on my telescope which do have the Stellarmate's RTC.
As per the documentation , one of the differences between these two drivers is that GPSD also sets the operating system time while NMEA do not.
However, in my test Raspi, using the GPSD driver with Stellarmate, I get INDI /EKOS / KStars updated with the GPS data, but operating system time is not synced.
Is this some kind of bug or there something I must do to sync also the system time ?
My test Raspi has not hardware clock. Not sure this can be related with the problem. I did not test it yet with the Raspi on my telescope which do have the Stellarmate's RTC.
3 years 5 months ago
#62410
The topic has been locked.
- John Robison
-
- Offline
- Elite Member
-
- Posts: 389
- Thank you received: 15
Replied by John Robison on topic Why you shouldn't use a GPS dongle.
Hello,
I have a U-BLOX 7 USB GPS. When I was having rule problems, I also had rights problems. I could not save my position. Come to find out, VNC was not showing the child authentication wind to authenticate as Root. While this was going on, I added an RTC to my RPI4B. Did it resolve everything? No. Once I got the rules straightened out, the U-BLOX sets the time, time zone, elevation, and location. I am on Astroberry 2.03.
I have a U-BLOX 7 USB GPS. When I was having rule problems, I also had rights problems. I could not save my position. Come to find out, VNC was not showing the child authentication wind to authenticate as Root. While this was going on, I added an RTC to my RPI4B. Did it resolve everything? No. Once I got the rules straightened out, the U-BLOX sets the time, time zone, elevation, and location. I am on Astroberry 2.03.
3 years 5 months ago
#62411
The topic has been locked.

Replied by Andrew on topic Why you shouldn't use a GPS dongle.
Does your 3D Printer have a Marlin mainboard, such as in an Ender series? If so, ensure the firmware file has a unique name to any firmwares previously loaded. A Timestamp filename system is the best way to avoid the issue.
3 years 5 months ago
#62422
The topic has been locked.
- Brian Davis
-
 Topic Author
Topic Author
- Offline
- Junior Member
-

- Posts: 33
- Thank you received: 15
Replied by Brian Davis on topic Why you shouldn't use a GPS dongle.
Pretty good guess! It's an Ender 3 V2. I've fixed it now, and it's currently printing a test faceplate for my CGEM, with 2 RJ45 ports, and a small hooded opening for a BME280 weather sensor to control dew heaters, refraction, and so forth. The actual problem I had, occurred when I tried to add a BL Touch to it , The docs showed lovely pictures and diagrams to be sure you plugged it in the right way, except that I have the newest 4.2.7 mainboard, which is wired differently. When I plugged in the BL Touch, it let the smoke out of my mainboard. New mainboard, different software, and hours of bed leveling, offset calculation, etc - it's printing again!
3 years 5 months ago
#62430
The topic has been locked.
Replied by Andrew on topic Why you shouldn't use a GPS dongle.
Ha! Thought so. I also got my first 3D printer recently.. An Ender 3 V2... And I love it! But I had issues loading new firmware from their website. It wouldn't boot. After some searching I found changing the file name did the trick.
But... I didn't have your issue releasing the ozone 'n blue smoke.. Ouch.
But... I didn't have your issue releasing the ozone 'n blue smoke.. Ouch.
3 years 5 months ago
#62460
The topic has been locked.
- Brian Davis
-
Topic Author
- Offline
- Junior Member
-
- Posts: 33
- Thank you received: 15
Replied by Brian Davis on topic Why you shouldn't use a GPS dongle.
Changing the board wasn't too bad, but it was a 3-hour struggle to get BLTouch working correctly. I love it now that it's working, but not so much when I was installing it. I also added an Octoprint Pi to the printer with a 3.5" touchscreen, which lets me control the printer from remote, and includes a Pi camera to watch the print from remote also - so I don't have to stay near it to babysit it. Octoprint was a must-do upgrade IMHO, and I have several extra Pi3b's laying around.
Have you tried the Smith3D firmware? Good stuff, especially with a BLTouch.
Have you tried the Smith3D firmware? Good stuff, especially with a BLTouch.
The topic has been locked.
Replied by Andrew on topic Why you shouldn't use a GPS dongle.
I haven't really done anything to the printer. It prints great once I tuned my Cura profiles.
3 years 5 months ago
#62497
The topic has been locked.
- Brian Davis
-
Topic Author
- Offline
- Junior Member
-
- Posts: 33
- Thank you received: 15
Replied by Brian Davis on topic Why you shouldn't use a GPS dongle.
Man, I love the Smith3D firmware. It has an AUX leveling tool in it that just takes most of the grief out of leveling the bed, and it also has tools for BLTouch that make finding the z offset easy as well. I use 5x5 bed leveling now before every print job, and haven't had a level issue since.
The BLTouch is a worth-the-hassle upgrade, but don't trust the docs.
Also, Ender did a fast shuffle with mainboards. The current board is 4.2.7 but many of the first V2's shipped with a 4.2.2 mainboard, that no one compiles firmware for.
The BLTouch is a worth-the-hassle upgrade, but don't trust the docs.
Also, Ender did a fast shuffle with mainboards. The current board is 4.2.7 but many of the first V2's shipped with a 4.2.2 mainboard, that no one compiles firmware for.
3 years 5 months ago
#62625
The topic has been locked.
- Brian Davis
-
Topic Author
- Offline
- Junior Member
-
- Posts: 33
- Thank you received: 15
Replied by Brian Davis on topic Why you should use a GPS dongle.
A GPS is never necessary for the operation of Stellarmate. You can set your time and position by hand more accurately than you can with a dongle GPS.
Here's what a GPS really looks like (taken from a stratum 1 timeserver):
Notice that GPS reports a course and speed. Recall that this server hasn't moved so much as a millimeter in a month. The receiver averages the time variation to create a "cooked TPV" , however it has to have a PPS tied to it to get the start of second. So the time is going to be off >= a half second on each time pushed to GPSD. The location can't be averaged however, since the course and heading values are used for navigation, and need to be real time. Software using the location data should use a regression to average the value into a true course approximation, or just average the values over a period of time to get the true location (which will not be precise, but within the 10m radius error bubble of the receiver.
NTP can fix the time issue by using the PPS signal. Here's what they look like:
Here you can see the time derived from the PPS + GPS listed as ".PPS."
The GPS alone, is listed as ".GPS." (The GPS entries lower down are actually the PPS or SHM clocks at other sites)
Notice the huge offset on the GPS time, along with a massive jitter value. This means, that the time received differs from the correct time by 631ms (.631 seconds) and the reported time varies by 51 milliseconds around that offset on every (once per second) transmit from the GPS. That's a lot of error. Notice that the PPS condition time barely varies at all - .001ms or 1 microsecond. The actual value is a bit less than that.
It is a fact, that using a dongle is less accurate than using google earth to set your location/time by hand. Sorry you wasted your money.
The topic has been locked.
- John Robison
-
- Offline
- Elite Member
-
- Posts: 389
- Thank you received: 15
Replied by John Robison on topic Why you should use a GPS dongle.
Hello,
Under KSTARS and INDI, GPSD is PPS based under Ubuntu. With Raspbian, CHRONY provides time. I would suggest using GPSD and properly configure it. I never thought to use GPS for time. PPS was it.
If a fixed pier is an astronomer’s site, yes, a GPS dongle is wasted money. My site is variable. A GPS dongle solved one problem, taming KSTARS. Stellarium can use INDI to talk with an astronomer’s equipment. Stellarium can use all equipment in INDI. Best $7 I spent to fix my position during my variable session.
U-Blox 7 device provides PPS. PPS is part of their setup requirements. Besides, my KSTARS GPS sampling rate is 15 minutes. Within KSTARS, I can update as needed manually. As long as I know where I am, a GPS dongle, (properly configured), is a welcomed addition.
A more stable site is required for a non GPS use. Preconfigured can be setup. Besides, this is my first thread I have read which said strange things about GPS dongles. I configured mine to meet recommended settings. It worked fine. When I looked at CGPS output, I saw 9 or more satellites it was polling from. If a clear line of site, time is pretty stable under PPS.
Not everyone needs a GPS dongle. Setting up a fixed position is one step. Resetting the RPI4B clock requires logging in and setting it manually within a terminal window. All of these steps work great for a remote and fixed site with internet. Internet NTP is pretty stable. GPS dongle is not needed.
No power, no internet, and a variable location is the realm of GPS dongles. Proper setup of GPS dongle use is required. Follow the manufacturer’s recommendations.
Under KSTARS and INDI, GPSD is PPS based under Ubuntu. With Raspbian, CHRONY provides time. I would suggest using GPSD and properly configure it. I never thought to use GPS for time. PPS was it.
If a fixed pier is an astronomer’s site, yes, a GPS dongle is wasted money. My site is variable. A GPS dongle solved one problem, taming KSTARS. Stellarium can use INDI to talk with an astronomer’s equipment. Stellarium can use all equipment in INDI. Best $7 I spent to fix my position during my variable session.
U-Blox 7 device provides PPS. PPS is part of their setup requirements. Besides, my KSTARS GPS sampling rate is 15 minutes. Within KSTARS, I can update as needed manually. As long as I know where I am, a GPS dongle, (properly configured), is a welcomed addition.
A more stable site is required for a non GPS use. Preconfigured can be setup. Besides, this is my first thread I have read which said strange things about GPS dongles. I configured mine to meet recommended settings. It worked fine. When I looked at CGPS output, I saw 9 or more satellites it was polling from. If a clear line of site, time is pretty stable under PPS.
Not everyone needs a GPS dongle. Setting up a fixed position is one step. Resetting the RPI4B clock requires logging in and setting it manually within a terminal window. All of these steps work great for a remote and fixed site with internet. Internet NTP is pretty stable. GPS dongle is not needed.
No power, no internet, and a variable location is the realm of GPS dongles. Proper setup of GPS dongle use is required. Follow the manufacturer’s recommendations.
The topic has been locked.
Time to create page: 0.893 seconds
© 2003-2022 by INDI Library. All rights reserved.