INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi / Rock Pi

Replied by Andrew on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi
Given the DIY nature of this controller, having control panel access to selecting the microstep factors and a higher max step value will be necessary.
On my side I edited the code for micro 8 and increased max steps to work with my motor design.
This is easy enough to do when I compile it for myself. But will be difficult when included as a 3rd party driver.
Please Log in or Create an account to join the conversation.
- Barry Dyer
-
- Offline
- New Member
-

- Posts: 1
- Thank you received: 1
Replied by Barry Dyer on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi / Rock Pi
I have a stepper motor purchased for another project that never came to be. I'm thinking of using this one which has a 1.8 degree per step motor but a 100:1 gearbox resulting in a 0.018 degree per step (give or take) but lots of torque. I've only recently started using Astroberry but am keen to create some additional fine focus control as I've not been happy with some of the results I've had with a set and forget approach to focusing.
My scope (Skywatcher Classic 200p) has no fine focus knob, only a coarse knob so I wanted to have more steps to better control the movement and I plan to couple the motor directly to the coarse focus shaft with a coupler and will dust off the 3d printer to cobble together a housing for the motor...
Anyone else with experience of high gear ratios and any limitations or caveats to be aware of?
Thanks in advance,
Baz
Please Log in or Create an account to join the conversation.
- Kevin Ross
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

- Posts: 421
- Thank you received: 102
Replied by Kevin Ross on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi / Rock Pi
That motor should be fine. In the default 32x microstepping configuration, it might move a little slow. If that turns out to be the case, you can change the DIP switches on the Waveshare HAT to a lower microstepping factor, to speed things up. You will need to modify the #define MICROSTEPPING at the top of the source code file to match the DIP switches, and rebuild the driver. But it will work as is, maybe just a little slow.
-- Kevin
Please Log in or Create an account to join the conversation.
- Anand Narwani
-

- Away
- New Member
-
- Posts: 19
- Thank you received: 4
Replied by Anand Narwani on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi / Rock Pi
Firstly a huge thank you for the work you've done on this driver. It's been a lot of fun playing with getting this working on my Raspberry Pi 4 and StellarmateOS. I have a question on microstepping and I suspect I am missing something elementary. I have a 1.8 degree (200 steps/rev) Nema14 motor that I am trying to pair with my SVX102T refractor. My scope has a CFZ of 111 microns and I am trying to achieve the recommended 10 steps per CFZ. I believe that using 1/8 steps should achieve this goal, but I am a loss as to how to make the driver do this. I tested with the Waveshare Python code (which needed to be corrected for the active high enable pin) and was able to make the stepper motor do a 1/8 rev with 200 steps:
Motor1.SetMicroStep('hardward','1/8step')
Motor1.TurnStep(Dir='forward', steps=200, stepdelay = 0.0001)
time.sleep(0.5)
Motor1.TurnStep(Dir='backward', steps=200, stepdelay = 0.0001)
Motor1.Stop()- To make this work for the focuser, I changed the MICROSTEPPING define in wmh_focuser.cpp to 8 and set the dip switches to 110 on the board. However, this still yields a full turn for 200 steps when I test using the Indi Control panel for the focuser. I'm sure I'm misunderstanding the intent of the MICROSTEPPING define, but for the life of my I can't figure it out.
- I then figured I could put the motor onto the fine focus knob, but wouldn't that make focusing really slow?
Please Log in or Create an account to join the conversation.
Replied by Andrew on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi / Rock Pi
Please Log in or Create an account to join the conversation.
Replied by Andrew on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi / Rock Pi
Switches 123 belong to motor 1
Switches 456 belong to motor 2
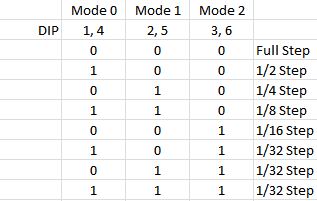
The Mode table is organized as Mode 2, Mode 1, Mode 0 in the documentation. I found they actually correspond to the DIP switches in reverse order.
Mode 0 is switch 1 and 4
Mode 1 is switch 2 and 5
Mode 2 is switch 3 and 6
So to set it for 1/8 step you need to set DIP 1, 2, 3 to 1, 1, 0 respectively.
Attachments:
Please Log in or Create an account to join the conversation.

Replied by Ettore on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi / Rock Pi
Stubborn as I am I wanted to try the waveshare stepper hat again; all worked out perfectly. Soon the report with 150PDS
Ettore
Please Log in or Create an account to join the conversation.
- Bill Glynn
-

- Offline
- New Member
-
- Posts: 4
- Thank you received: 0
Replied by Bill Glynn on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi / Rock Pi
Can't tell you how much I appreciate the work you have done on the Waveshare Hat focuser module. I have been working on fabricating a motor bracket for my 1990's C8 and a Nikon 70-200mm F2.8 lens. Attached photos of the completed brackets and presently performing software calibrations for travel parameters before attempting outdoor focusing tests.
I am using a 5:1 pulley reduction on the C8 and a 6:1 reduction on the Nikon lens.
Thanks again!
Bill G



Attachments:
Please Log in or Create an account to join the conversation.
- Kevin Ross
-
Topic Author
- Offline
- Elite Member
-
- Posts: 421
- Thank you received: 102
Replied by Kevin Ross on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi / Rock Pi
Please Log in or Create an account to join the conversation.
- Bill Glynn
-
- Offline
- New Member
-
- Posts: 4
- Thank you received: 0
Replied by Bill Glynn on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi
I see that your RPi4 is attached directly to the scope. Does it have a cooling fan and if so are there no vibration concerns? I would love to fasten it to my mount but was concerned about vibration?
Bill G
Please Log in or Create an account to join the conversation.
- Kevin Ross
-
Topic Author
- Offline
- Elite Member
-
- Posts: 421
- Thank you received: 102
Replied by Kevin Ross on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi
")
My Pi does not have a cooling fan. I never have problems with it overheating. But I don't live in the desert, where it can be 100 degree F at midnight.
Please Log in or Create an account to join the conversation.
- Bill Glynn
-
- Offline
- New Member
-
- Posts: 4
- Thank you received: 0
Replied by Bill Glynn on topic INDI focuser driver for Waveshare Stepper Motor HAT for Raspberry Pi
Thanks
Bill
Super Polaris C8, Nikon D850, RPI4, Stellarmate OS, Waveshare Focusing Module, Waveshare hat and motor
Please Log in or Create an account to join the conversation.