




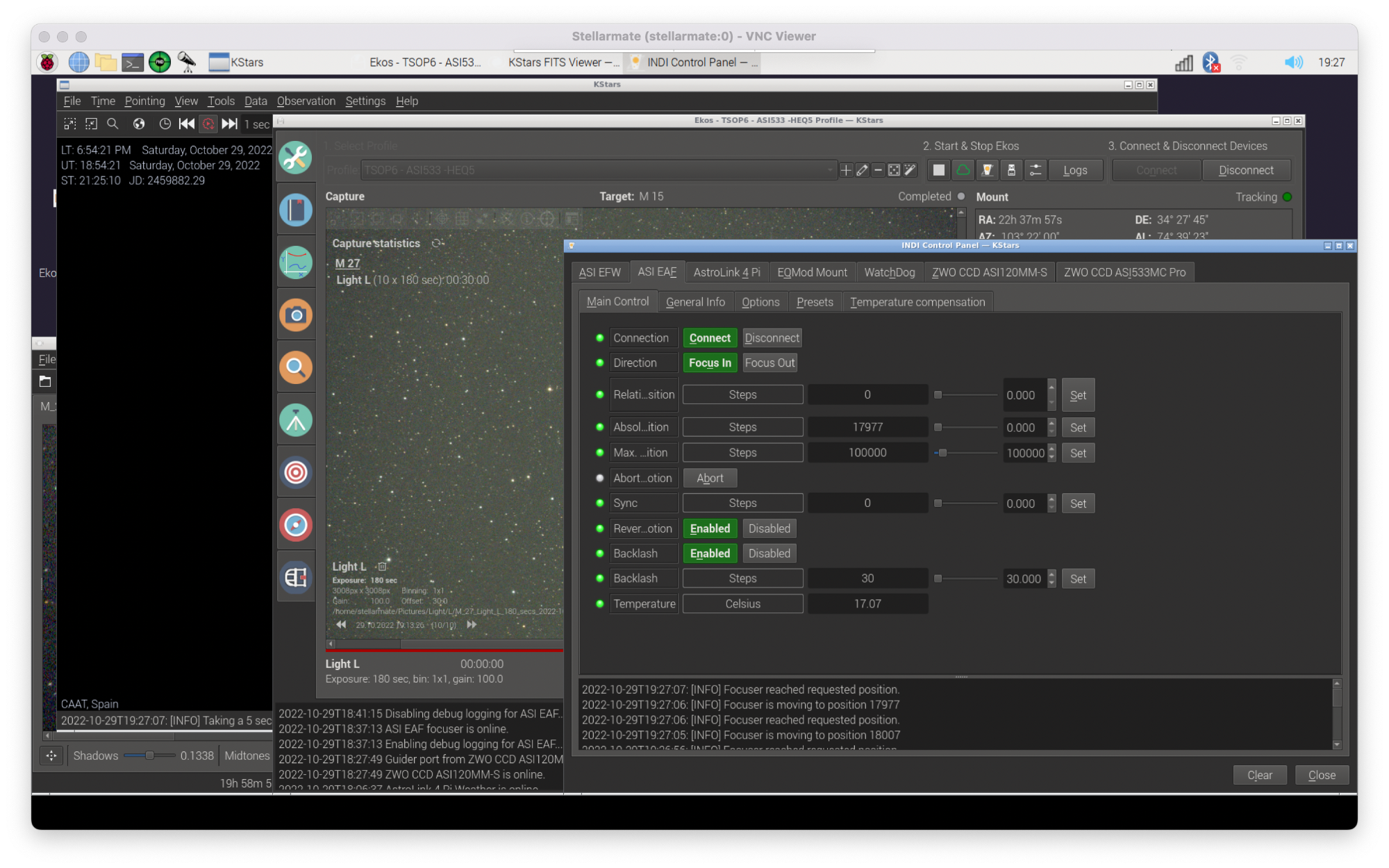
I've discovered a posible solution: you must select another source for the temperatura and then go back to the ZWO EAF. Then it begins to receive the temperature information from the sensor
Read More...
Hi,
Recently I've added a temperature sensor to my ZWO EAF focuser. Apparently, it works fine, because I can see the temperature value on the INDI driver, but the value shown on the focus module is a different one
Read More...
I don't think so, is a thing of the debug mode.
Anyway, you can install CFITSIO and use funpack command to uncompress the FITS files before you feed them to ASTAP.
Regards
Read More...
Recently, on an
Astrobin's message thread
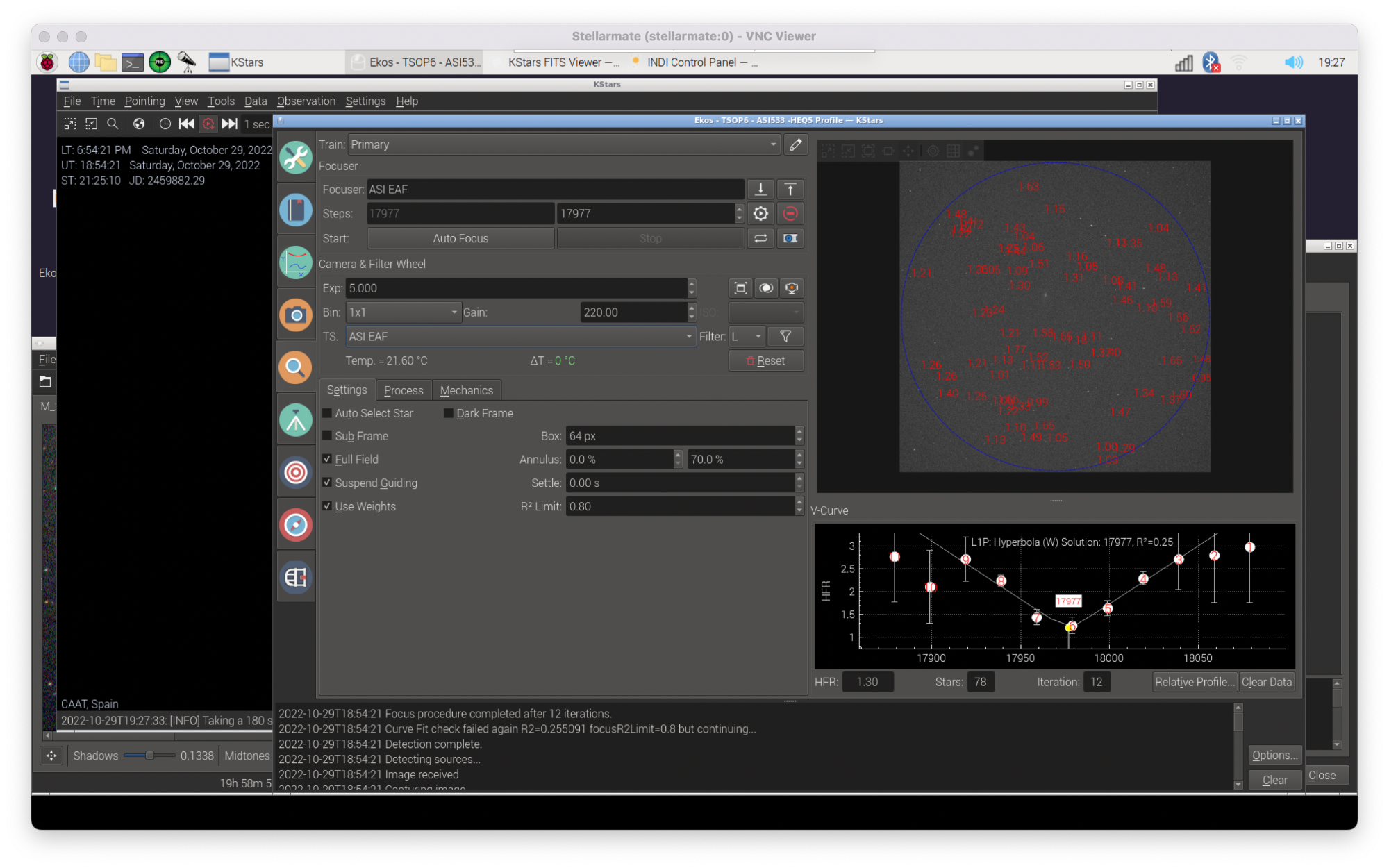
I've discovered that ASTAP has a powerful module to analyse focus performance. Basically you need a sequence of images, from the focus procedure. ASTAP expect to found the focus position on FITS header. So, after configuring the camera driver to scoop on my ZWO EAF, I've enabled store debugging images and run a focus sequence with the verbose logging enabled. All fine, all good, at the end I've a folder with all the pictures. And now, the problems begins: the debug images are not plain FITS files, but compressed ones and ASTAP is unable to open them
XTENSION= 'BINTABLE' / binary table extension
BITPIX = 8 / 8-bit bytes
NAXIS = 2 / 2-dimensional binary table
NAXIS1 = 8 / width of table in bytes
NAXIS2 = 961 / number of rows in table
PCOUNT = 12591434 / size of special data area
GCOUNT = 1 / one data group (required keyword)
TFIELDS = 1 / number of fields in each row
TTYPE1 = 'COMPRESSED_DATA' / label for field 1
TFORM1 = '1PB(15033)' / data format of field: variable length array
ZIMAGE = T / extension contains compressed image
ZSIMPLE = T / file does conform to FITS standard
ZBITPIX = 16 / data type of original image
ZNAXIS = 2 / dimension of original image
ZNAXIS1 = 3008 / length of original image axis
ZNAXIS2 = 3008 / length of original image axis
ZTILE1 = 100 / size of tiles to be compressed
ZTILE2 = 100 / size of tiles to be compressed
ZCMPTYPE= 'RICE_1 ' / compression algorithm
ZNAME1 = 'BLOCKSIZE' / compression block size
ZVAL1 = 32 / pixels per block
ZNAME2 = 'BYTEPIX ' / bytes per pixel (1, 2, 4, or 8)
ZVAL2 = 2 / bytes per pixel (1, 2, 4, or 8)
BZERO = 32768 / offset data range to that of unsigned short
BSCALE = 1 / default scaling factor
DATAMIN = 0. / Minimum value
DATAMAX = 65532. / Maximum value
MIN1 = 0. / Min Channel 1
MAX1 = 65532. / Max Channel 1
MEAN1 = 6042.48293781669 / Mean Channel 1
MEDIAN1 = 5996. / Median Channel 1
STDDEV1 = 945.28053571818 / Standard Deviation Channel 1
ROWORDER= 'TOP-DOWN' / ROWORDER
INSTRUME= 'ZWO CCD ASI533MC Pro' / INSTRUME
TELESCOP= 'EQMod Mount' / TELESCOP
OBSERVER= 'Unknown ' / OBSERVER
OBJECT = 'Vega ' / OBJECT
EXPTIME = 4. / Total Exposure Time (s)
CCD-TEMP= -10. / CCD Temperature (Celsius)
PIXSIZE1= 3.76 / Pixel Size 1 (microns)
PIXSIZE2= 3.76 / Pixel Size 2 (microns)
XBINNING= 1 / Binning factor in width
YBINNING= 1 / Binning factor in height
XPIXSZ = 3.76 / X binned pixel size in microns
YPIXSZ = 3.76 / Y binned pixel size in microns
FRAME = 'Light ' / FRAME
IMAGETYP= 'Light Frame' / IMAGETYP
FILTER = 'L ' / FILTER
XBAYROFF= 0 / X offset of Bayer array
YBAYROFF= 0 / Y offset of Bayer array
BAYERPAT= 'RGGB ' / Bayer color pattern
FOCALLEN= 600. / Focal Length (mm)
APTDIA = 150. / Telescope diameter (mm)
FOCUSPOS= 16686 / Focus position in steps
FOCUSTEM= 30.32 / Focuser temperature in degrees C
SCALE = 1.292813 / arcsecs per pixel
SITELAT = 39.47528 / Latitude of the imaging site in degrees
SITELONG= -0.3761111 / Longitude of the imaging site in degrees
AIRMASS = 1.078274 / AIRMASS
OBJCTAZ = 277.3479 / Azimuth of center of image in Degrees
OBJCTALT= 68.01898 / Altitude of center of image in Degrees
OBJCTRA = '18 37 07.43' / Object J2000 RA in Hours
OBJCTDEC= '38 46 01.76' / Object J2000 DEC in Degrees
RA = 279.281 / Object J2000 RA in Degrees
DEC = 38.76716 / Object J2000 DEC in Degrees
PIERSIDE= 'EAST ' / East, looking West
EQUINOX = 2000 / EQUINOX
CRVAL1 = 279.28097043 / CRVAL1
CRVAL2 = 38.767156302 / CRVAL2
RADECSYS= 'FK5 ' / RADECSYS
CTYPE1 = 'RA---TAN' / CTYPE1
CTYPE2 = 'DEC--TAN' / CTYPE2
CRPIX1 = 1504. / CRPIX1
CRPIX2 = 1504. / CRPIX2
SECPIX1 = 1.2928133301 / SECPIX1
SECPIX2 = 1.2928133301 / SECPIX2
CDELT1 = 0.0003591148139 / CDELT1
CDELT2 = 0.0003591148139 / CDELT2
CROTA1 = 356.54639159 / CROTA1
CROTA2 = 356.54639159 / CROTA2
DATE-OBS= '2022-10-24T18:20:31.386' / 2022-10-24T18:20:31.386
COMMENT = ' ' / Generated by INDI
GAIN = 340. / GAIN
OFFSET = 30. / OFFSET
END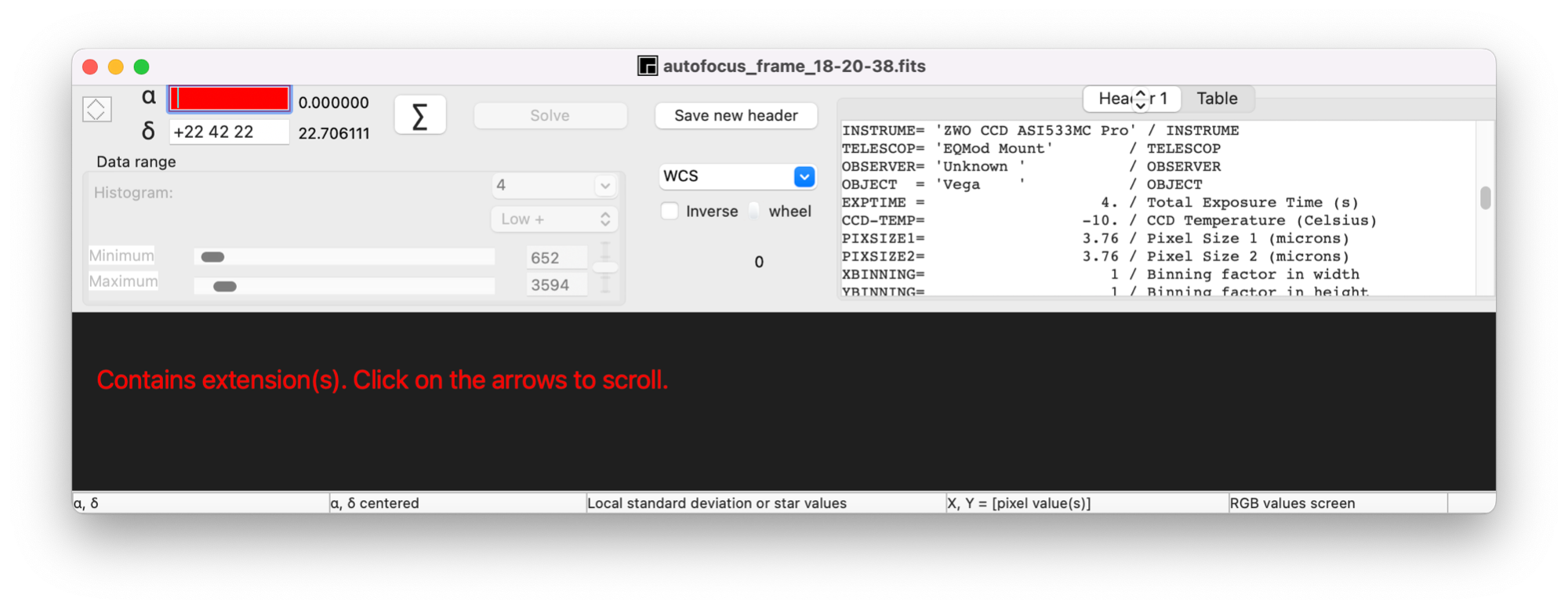
I've not found any place on Ekos to change this configuration (In fact I've not found any reference to FITS compression at all). Do you know if there are any hidden flag to disable compression?
Read More...
The only think that bother me about Ubuntu Desktop is that I can't find a quick way to setup a headless box from zero. You always will need a HDMI monitor, keyboard and mouse to configure a system. I love the easiness of setting up an Astroberry / Stellarmate system
Read More...
Thanks Hy, good trick to use the sequence limits to tigger a refocus inside each sequence!. I'll try on next clear night!
Read More...
Thanks Peter to confirm my bad results. Now the question is, how can we improve the results with OSC cameras? Any clue about how to proceed?
Regards
Read More...
Rob, do you have any clue about this? How can I be sure that I'm using the channel I hope to be using?
Read More...
I've discovered an error when using greedy scheduler. My workflow is to divide all my capture sessions on 1h tranches. I've a set of different sequences files that all sums 1h with different exposure for frame (12x300, 20x180, 60x60). So I usually put an entry on the classic scheduler for an object with this sequence and I use the "Repeat N" option to obtain the expected exposure. I've the scheduler configured to recenter, focus and guide on each job. This ensures me that after each 1h run I'll refocus and recenter the target. All fine, all good.
Now, greedy scheduler enter into scene. I love the concept to keep the telescope busy as much as it can. But it looks to me that is too greedy. For example, with this setup
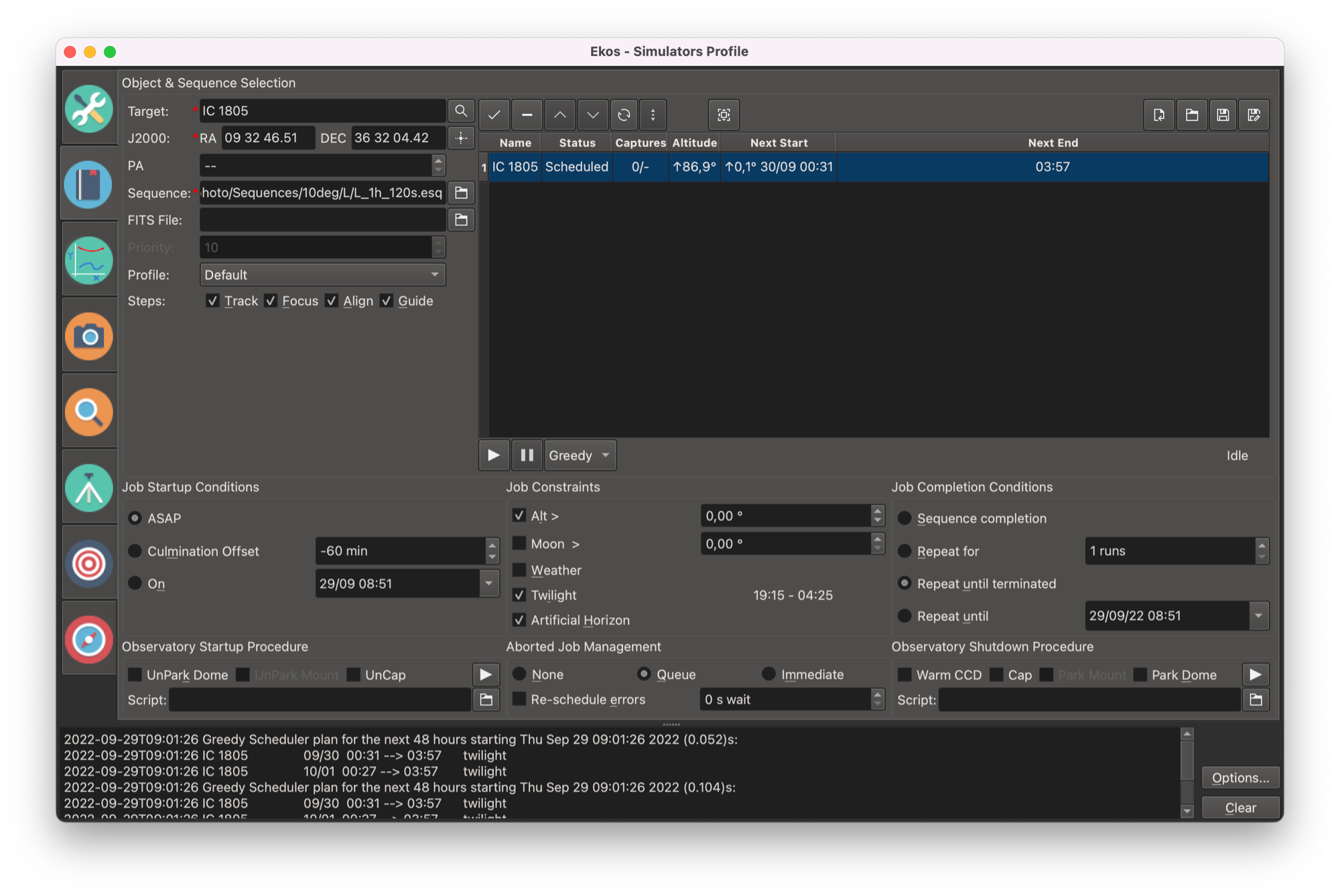
I'll expect the the target will be shoot since it is visible until twilight on 1h runs. And I expect that each hour the focus / entering step will be taken. But when I run a schedule like this, it begins and keeps going until twilight without the expected focusing / entering after each job.
Could it be possible to recover this behaviour on greedy?
Thanks
Read More...
Really I don't understand what's happening here. I thought that the changes to use G channel by default was in place, but after a long pause for weather and health problems I've been again under stars with bad results.
I'm using 64bits Stellarmate with KStars 3.6.0 (the latest stable one).
On FITS viewer, I've configured 3D Cube checked and WCS checked (this latest is not needed).
On the focus module, I've configured detection SEP and SEP profile to the standard 1-Focus-Default. The algorithm used is Linear 1 Pass (but I think that doesn't matter)
With this configuration I expect that the focus algorithm will use the green channel or the average of them (I don't remember which one was the final decision). But what I've found is that it keeps using the R channel with bad results for the other two. This is the top left corner. You can see how the spikes of the bright star begins to duplicate and separate, also, this will show coma on G and B channels:

Red

Green

Blue
So my question is: are there any way to influence which channel is used that I'm not aware of if?. Are there any information logged out about the kind of image StellarSolver is using here?
Thanks a lot
Read More...
I'm on the same situation. Also the network / Bluetooth icons are duplicated. Ones with "old looking" icons and the newer ones with a more stylised look. I can't get rid of them with the Panels configuration menu
Read More...