×
INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
myFocuserPro or myFocuserPro2 and INDI

Replied by Spartacus on topic myFocuserPro or myFocuserPro2 and INDI
There are some pictures and an explanation on IceInSpace. Here is the link
www.iceinspace.com.au/forum/showthread.php?t=173159
I run it off a 10amp 12 volt power supply but have used a 100AH battery too. I am always a bit cautious pulling everything off 1 battery supply although no real reason why it would not take it.
By way of explanation the large square thing on the box is a cooling fan as the odroid can get a bit warm and so can the dew controller. This is thermostatically controlled from the dew controller pcb temp so keeps it all nice and cool in our summer heat in Queensland.
The Odroid is significantly more powerful than the RPi and uses USB3. The downside is the heat.
Cheers
Mike
www.iceinspace.com.au/forum/showthread.php?t=173159
I run it off a 10amp 12 volt power supply but have used a 100AH battery too. I am always a bit cautious pulling everything off 1 battery supply although no real reason why it would not take it.
By way of explanation the large square thing on the box is a cooling fan as the odroid can get a bit warm and so can the dew controller. This is thermostatically controlled from the dew controller pcb temp so keeps it all nice and cool in our summer heat in Queensland.
The Odroid is significantly more powerful than the RPi and uses USB3. The downside is the heat.
Cheers
Mike
The following user(s) said Thank You: David
5 years 1 month ago
#36507
The topic has been locked.

Replied by Robert on topic myFocuserPro or myFocuserPro2 and INDI
Hi Paul
Robert here. Am willing to help or further develop the INDI driver you started. Am author of myFocuserPro and Pro2. If you still have the sources/time would like to progress this.
Regards
Robert
Robert here. Am willing to help or further develop the INDI driver you started. Am author of myFocuserPro and Pro2. If you still have the sources/time would like to progress this.
Regards
Robert
5 years 1 month ago
#37079
The topic has been locked.
Replied by PDB on topic myFocuserPro or myFocuserPro2 and INDI
Hi Robert,
that is great. Only one problem... I am in hospital at the moment and don't have access to my main computer and sources. Might take a while before they release me here, I will contact you via PM on this forum when I am back in business. (Would like to discuss a few things with you anyway).
Kind regards,
Paul
that is great. Only one problem... I am in hospital at the moment and don't have access to my main computer and sources. Might take a while before they release me here, I will contact you via PM on this forum when I am back in business. (Would like to discuss a few things with you anyway).
Kind regards,
Paul
5 years 1 month ago
#37162
The topic has been locked.
- Wouter van Reeven
-

- Offline
- Supernova Explorer
-

- Posts: 1957
- Thank you received: 420
Replied by Wouter van Reeven on topic myFocuserPro or myFocuserPro2 and INDI
Get well soon, Paul. I hope it’s nothing serious.
Wouter
Wouter
5 years 1 month ago
#37165
The topic has been locked.
Replied by Robert on topic myFocuserPro or myFocuserPro2 and INDI
No problem, get well and rest
regards
Robert
regards
Robert
5 years 1 month ago
#37197
The topic has been locked.
Replied by Robert on topic myFocuserPro or myFocuserPro2 and INDI
Hi Paul
If you are up to it, I would like to see what can be done to progress the INDI driver for myFocuserPro2.
I can be contacted on Yahoo e-mail at brown_rb
'
Regards
Robert
If you are up to it, I would like to see what can be done to progress the INDI driver for myFocuserPro2.
I can be contacted on Yahoo e-mail at brown_rb
'
Regards
Robert
4 years 10 months ago
#40635
The topic has been locked.
- Alan Townshend
-

- Offline
- Senior Member
-

- Posts: 77
- Thank you received: 14
Replied by Alan Townshend on topic myFocuserPro or myFocuserPro2 and INDI
Hi guys, I was following this thread with interest, but decided to have a go myself. The hardest part so far was getting a development environment working, which I eventually achieved!
Since then I have created a MyFocuserPro2 driver that is based on the moonlite and currently implements the following
Move functions (In, Out, Target, Sync, Current Position, Max position)
Step mode (full - 1/32),
Coil Power (On Off)
Motor speed (1,2,3)
Display (On Off)
I will try and implement "Reverse Direction" tomorrow time permitting.
I have not done anything regarding temperature, as I have not got this option enabled on my focuser, and so cannot test it.
The biggest issue I will have is actually getting this code into the project, and any help with would be greatly received, but not quite there yet.
What would people suggest are the 2nd layer functions that perhaps I should try to implement, if any, that MyFocuserPro2 supports?
Since then I have created a MyFocuserPro2 driver that is based on the moonlite and currently implements the following
Move functions (In, Out, Target, Sync, Current Position, Max position)
Step mode (full - 1/32),
Coil Power (On Off)
Motor speed (1,2,3)
Display (On Off)
I will try and implement "Reverse Direction" tomorrow time permitting.
I have not done anything regarding temperature, as I have not got this option enabled on my focuser, and so cannot test it.
The biggest issue I will have is actually getting this code into the project, and any help with would be greatly received, but not quite there yet.
What would people suggest are the 2nd layer functions that perhaps I should try to implement, if any, that MyFocuserPro2 supports?
4 years 8 months ago
#42822
The topic has been locked.
- Jasem Mutlaq
-

- Online
- Administrator
-

Replied by Jasem Mutlaq on topic myFocuserPro or myFocuserPro2 and INDI
Hi Alan,
Thanks a lot for your work, it's greatly appreciated! Can you tell us why setting the development environment was difficult? If it is difficult, we need to improve documentation and HOWTOs to make it easier.
Thanks a lot for your work, it's greatly appreciated! Can you tell us why setting the development environment was difficult? If it is difficult, we need to improve documentation and HOWTOs to make it easier.
4 years 8 months ago
#42912
The topic has been locked.
- Alan Townshend
-
- Offline
- Senior Member
-
- Posts: 77
- Thank you received: 14
Replied by Alan Townshend on topic myFocuserPro or myFocuserPro2 and INDI
I have just spent 5 minutes writing a response, including some of the install issues and an update to progress, to only loose the reply when submitting!!!!!
I clicked "I'm not a robot", then "Submit". Next a Captcha popped up, which I clicked. The captcha disappeared, and so did my post, and I was presented with an infuriating message to complete "Captcha" before posting!!!
I clicked "I'm not a robot", then "Submit". Next a Captcha popped up, which I clicked. The captcha disappeared, and so did my post, and I was presented with an infuriating message to complete "Captcha" before posting!!!
4 years 8 months ago
#42915
The topic has been locked.
- Alan Townshend
-
- Offline
- Senior Member
-
- Posts: 77
- Thank you received: 14
Replied by Alan Townshend on topic myFocuserPro or myFocuserPro2 and INDI
I think I have found a bug in this forum interface. If you click "I'm not a robot", followed by submit (before the captcha appears, then the post is lost. Interestingly, I don't have the "Captcha" visible for this post.
Anyway, back to the important stuff, I have coded the "Reverse motor" function, and plan on doing some pre-sets on the main page for 1,10,100,500.
I am developing on a desktop, intel processor, (I did try and do it on my raspberry Pi, but struggled, and will start a new thread about this). I would like to test my code on the Raspberry Pi, but not sure how to proceed. Can I just take the intel compiled code and run it on the Raspberry Pi (arm processor)? If so what files do I actually need (I have an extensive Windows programming background, but almost zero Linux programming).
Anyway, back to the important stuff, I have coded the "Reverse motor" function, and plan on doing some pre-sets on the main page for 1,10,100,500.
I am developing on a desktop, intel processor, (I did try and do it on my raspberry Pi, but struggled, and will start a new thread about this). I would like to test my code on the Raspberry Pi, but not sure how to proceed. Can I just take the intel compiled code and run it on the Raspberry Pi (arm processor)? If so what files do I actually need (I have an extensive Windows programming background, but almost zero Linux programming).
4 years 8 months ago
#42916
The topic has been locked.
- Jasem Mutlaq
-
- Online
- Administrator
-
Replied by Jasem Mutlaq on topic myFocuserPro or myFocuserPro2 and INDI
No you need to recompile on the raspberry pi, or use a cross-compiler. So just use sftp or git clone (if you are using git to host your code) and then run cmake and then make.
4 years 8 months ago
#42945
The topic has been locked.
- Alan Townshend
-
- Offline
- Senior Member
-
- Posts: 77
- Thank you received: 14
Replied by Alan Townshend on topic myFocuserPro or myFocuserPro2 and INDI
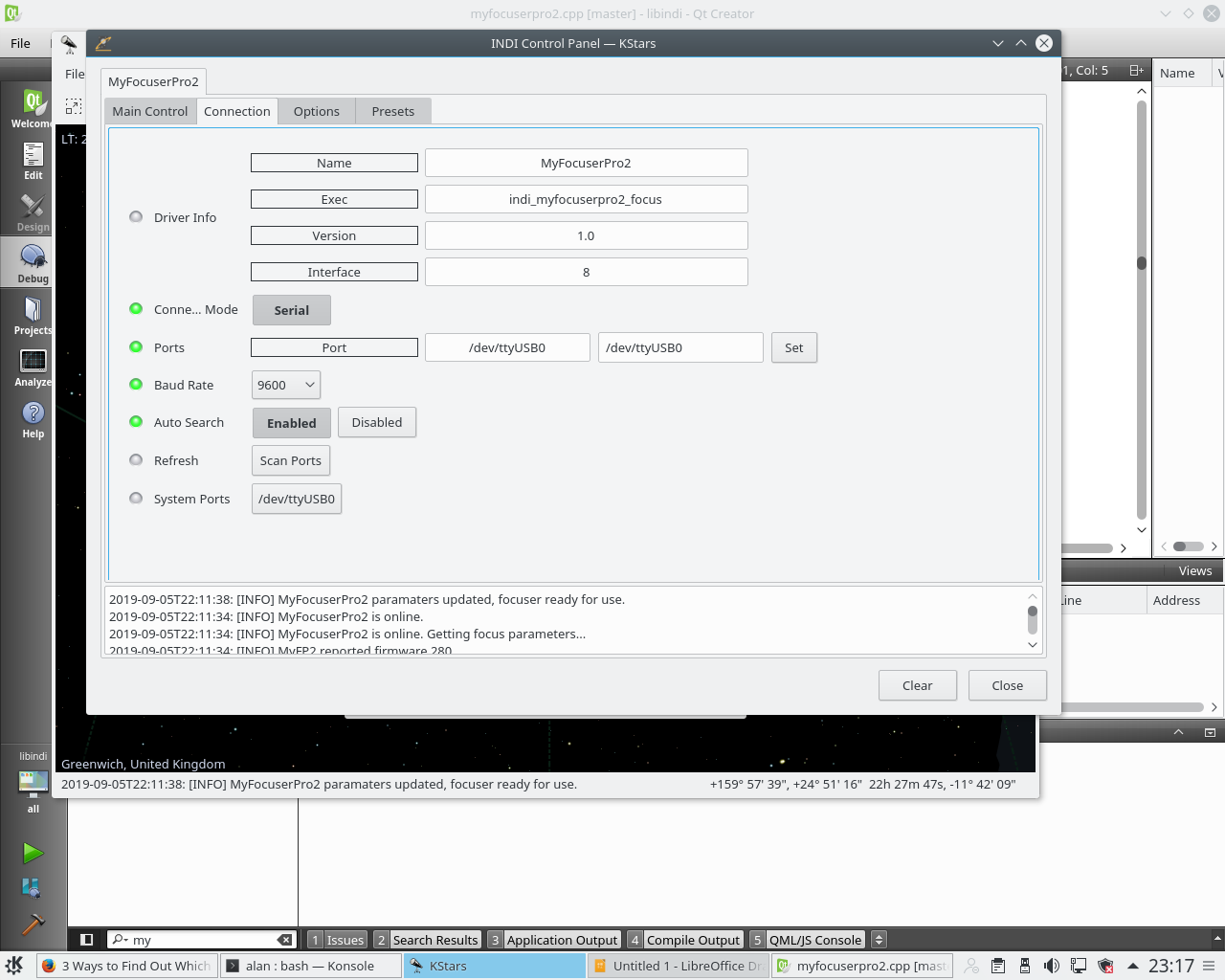
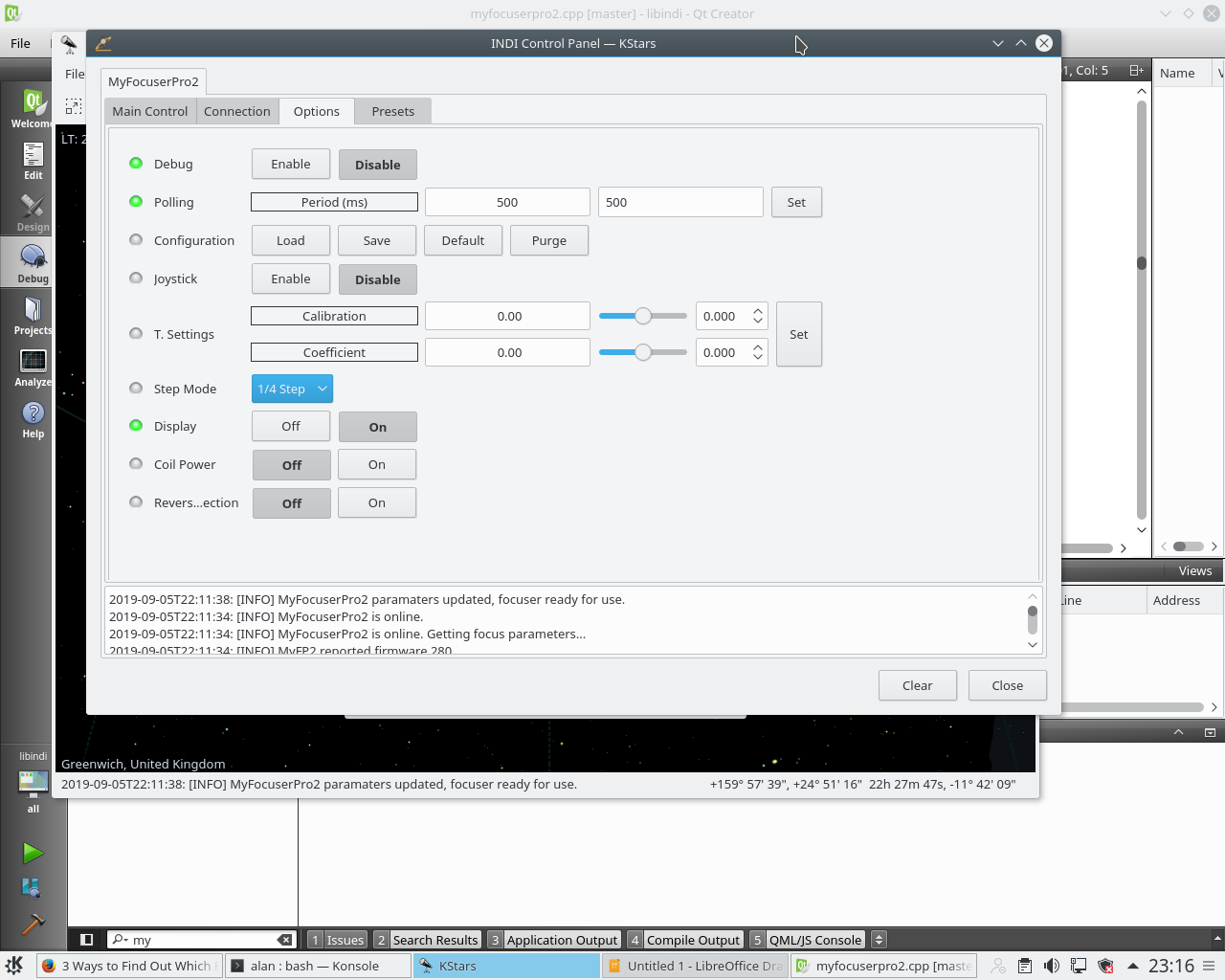
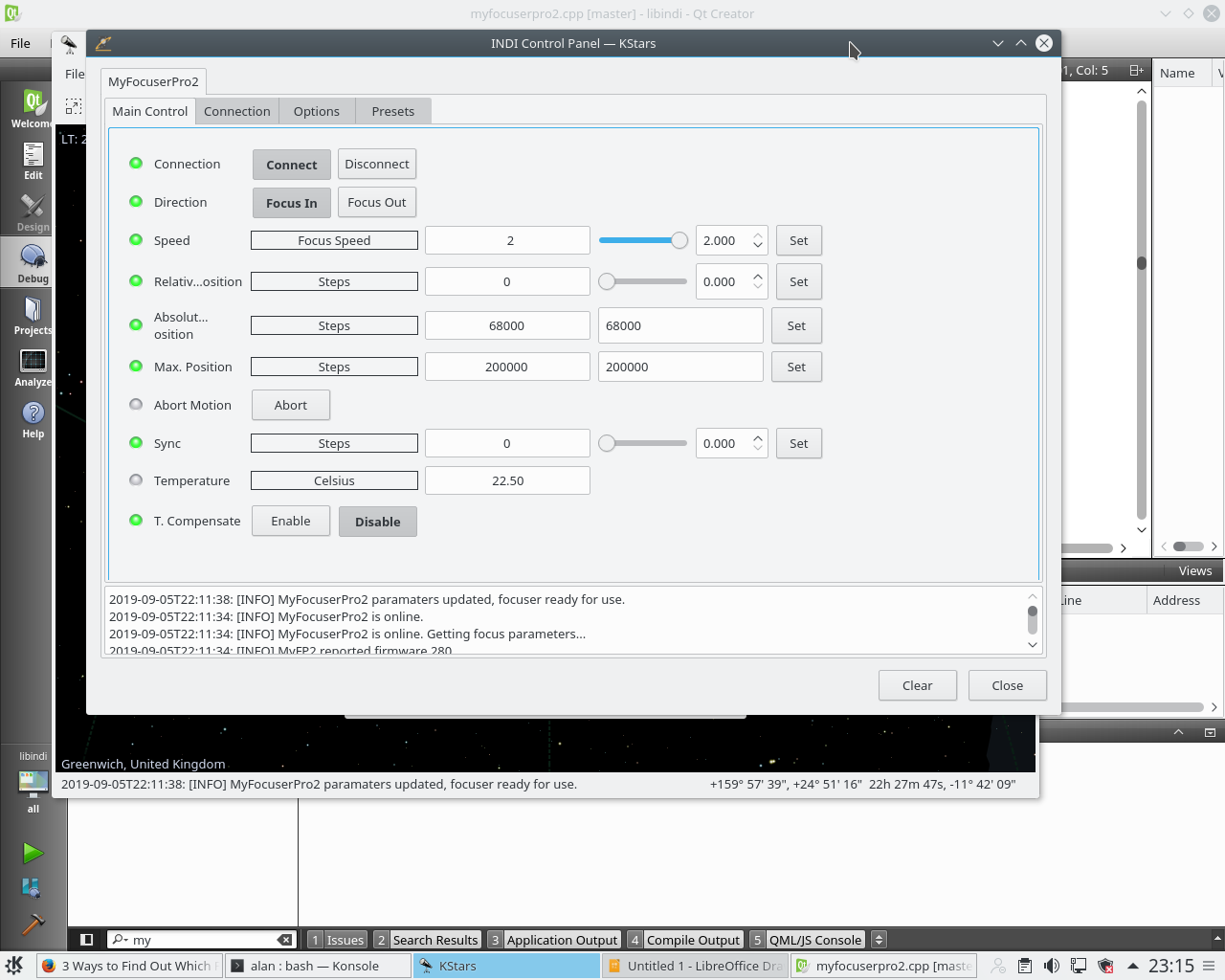
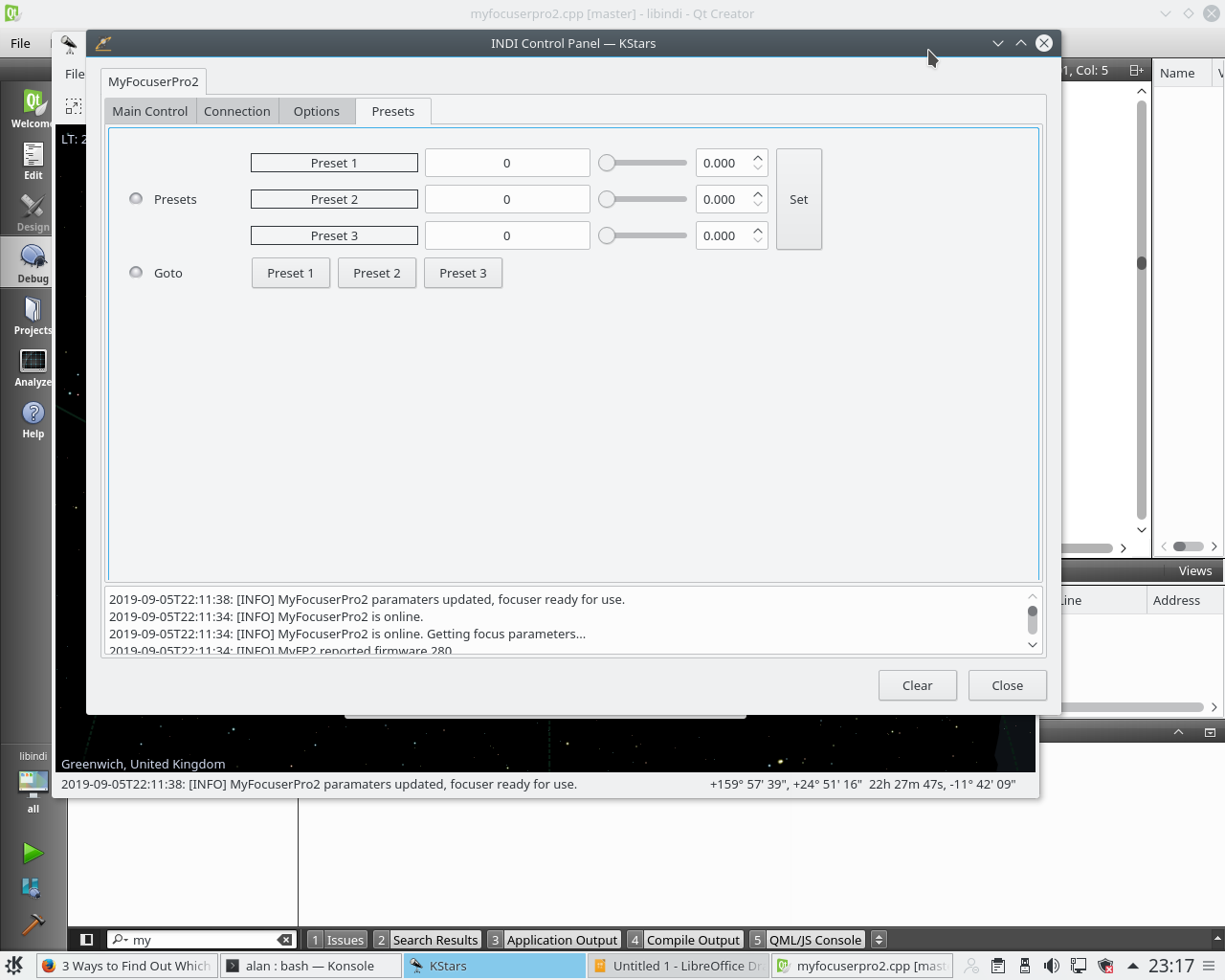
Ok, So very pleased with progress, see attached screen grabs (the only thing not working is Temperature Calibration (think this is supposed to be just an offset to the rad temperature, but can't find any offset in the MFP2 arduino code).
The following user(s) said Thank You: Jasem Mutlaq
4 years 8 months ago
#43058
The topic has been locked.
Time to create page: 1.062 seconds
© 2003-2022 by INDI Library. All rights reserved.