


Exactly. You need the equivalent of a computer science degree to use Linux. That's what IT people are. But that's the problem. Regular people aren't IT people. The average person doesn't give a crap about the terminal and the cryptic and obtuse commands of Linux. Even DOS is simpler and more straightforward than Linux command-line processes, and nobody cares to deal with that either. They have things to do. They just want to use a program for their needs, whatever that may be. They don't care about SUDO and GREP, only people in computer science do.
Read More...
I don't know where you live, but here in the US computers are either Windows or Macs. This is not to say there may be some other place in the world where you can get a laptop to desktop with Linux preinstalled, but not here. You can order one like that from China, but you won't find them here otherwise.
Windows and Macs have terminals too, but nobody needs to use them to get anything done. That's the point. Linux is a great operating system, but it's still stuck in 1991 with it's insistence of using the terminal.
What I like about Astroberry and Stellarmate is that I can install the ISO and just go. Their Achilles Heel is that they run on Linux. When you need to add or change anything, you need to go to the terminal. I just leave them alone because I don't care to be spending my time typing cryptic and obtuse commands to simply try to get from point A to point B.
The reason I'd like to see INDI on Windows is because I prefer to use KStars over something like NINA. Not that NINA is bad, I just prefer KStars. Actually, if KStars would simply recognize the ASCOM platform, then I would just use that. The only real advantage INDI has, and really the reason I use it other than KStars needs it, is that the libgphoto2 database it uses has camera drivers that don't exist in ASCOM.
Read More...
Um, no. You buy a computer, Windows is already installed. Install the ASCOM platform (no terminal command-line voodoo needed), install your hardware drivers and astrophotography apps (no terminal command-line voodoo needed) connect your hardware, and go.
Read More...
I don't want to virtualize. I don't want to deal with command-line voodoo. It's why I can't stand Linux, it's still stuck in 1991, with insistence on using the command line to get things done. You need to have the equivalent of a computer science degree to use it. I like Astroberry because for the most part it works right out of the box, and I don't have to deal with the terminal other than to set the clock.
Read More...
Thanks for your replies.
So then the answer is no, I can't have the focuser finalize focus on a counter-clockwise sweep. This is unfortunate, as I can't use the focus module to focus my SCT. So I will simply have to periodically manually refocus the SCT.
Thanks again.
Read More...
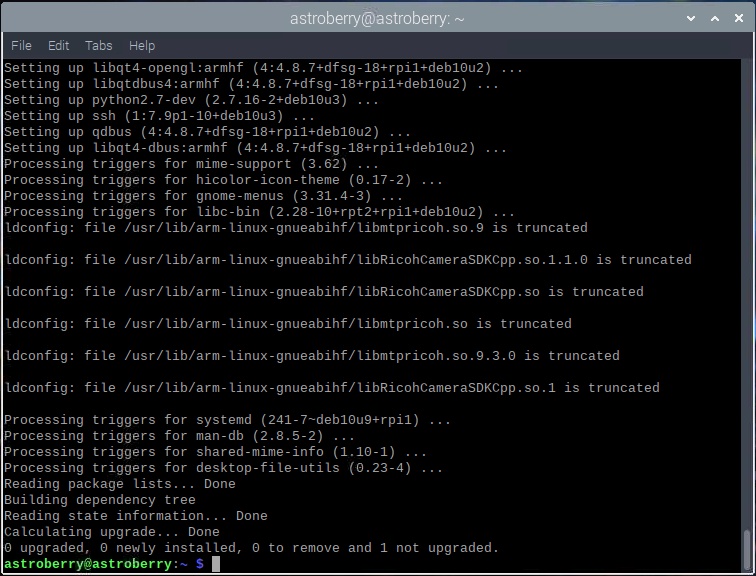
Hi Folks, from time to time I go into the terminal and run the update command:
sudo apt update && sudo apt upgrade && sudo apt dist-upgrade
It then proceeds to go through what appears to be an endless series on installations, but in the end, it says that nothing was updated, as you can see below.
So I'm at a loss as to what happened several hundred lines of text before that last line? This has occurred the least several times I've run that update command, over the course of a year or more.
So what's going on there? Is anything actually ever updated, or is that just some bizarre programming ritual?
Thanks.
Read More...
I have two questions concerning the focus module process, and it's use during a session.
First, if I understand the focus operation correctly, it will perform a series of iterative focus sweeps back and forth until it hits the lowest HFR number. When it finalizes this lowest number, has it moved the focus motor "out" towards infinity, or can it revert back from "past" infinity until it hits the lowest HFR number? The reason I ask is because I will be using the focus module with an SCT scope, and the final focus movement on an SCT must always be counterclockwise towards infinity, in order to "push" the mirror up to avoid mirror flop. So does the focus module finalize it's focus setting "pushing outwards", or does it just move either way until it hits the lowest HFR?
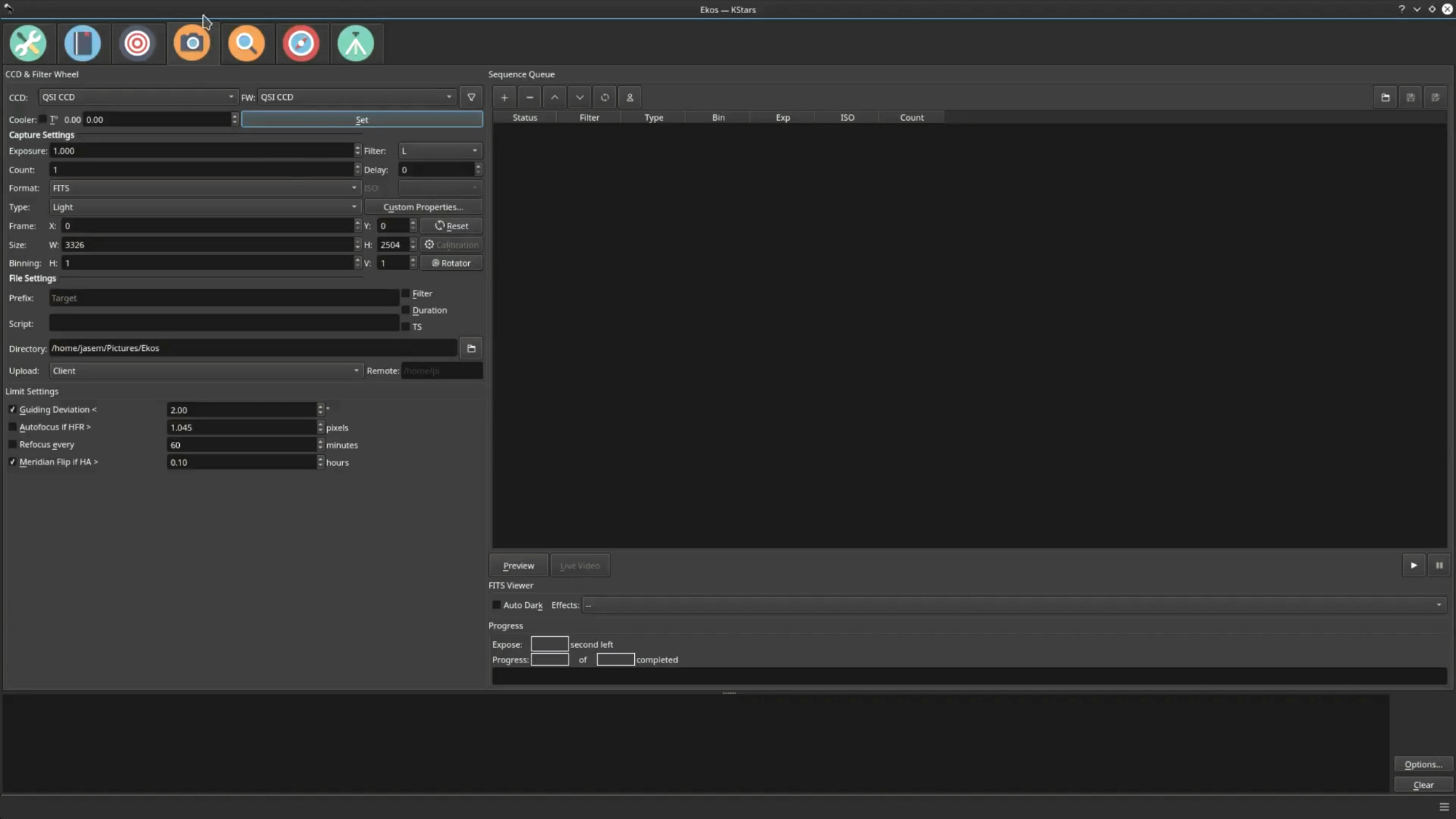
The second question concerning focusing is how do I get it to periodically refocus. Watching the Stellarmate focus module tutorial video, which is now five years old, the camera module had a provision to set refocusing for a given amount of time, as well as to refocus if HFR rose above x setting, as you can see in the screen grab below. Those settings are no longer in the camera module, and I don't see any other module that has them. So how do you set Ekos to refocus at a given interval of time?
Thank you.
Read More...
Hmm, I'm not Linux savvy, where do you find the kernel logs, and what is dmesg?
I tried the unit by itself on all 4 USB ports with nothing else connected, so I'm not sure what it's expecting to see.
Read More...
I recently picked up a C8 and a Celestron focus motor for it. I noticed with the Celestron Windows software, there is an initial calibration procedure required for the focus motor.
Id there a similar routine needed in Ekos?
Thanks.
Read More...
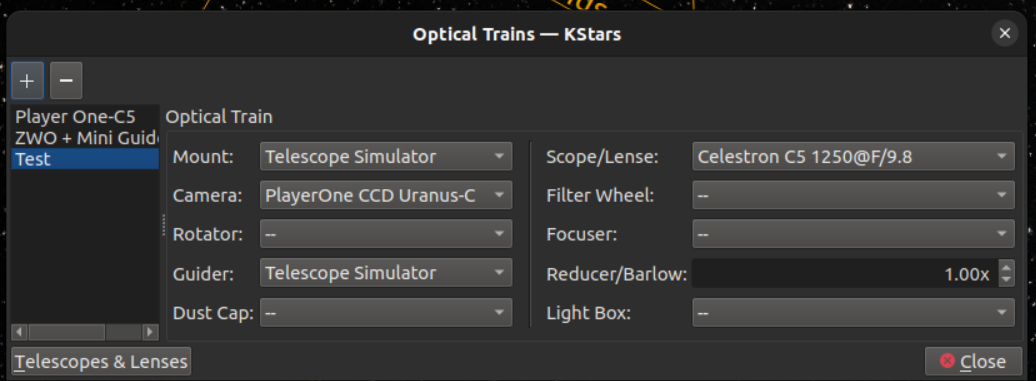
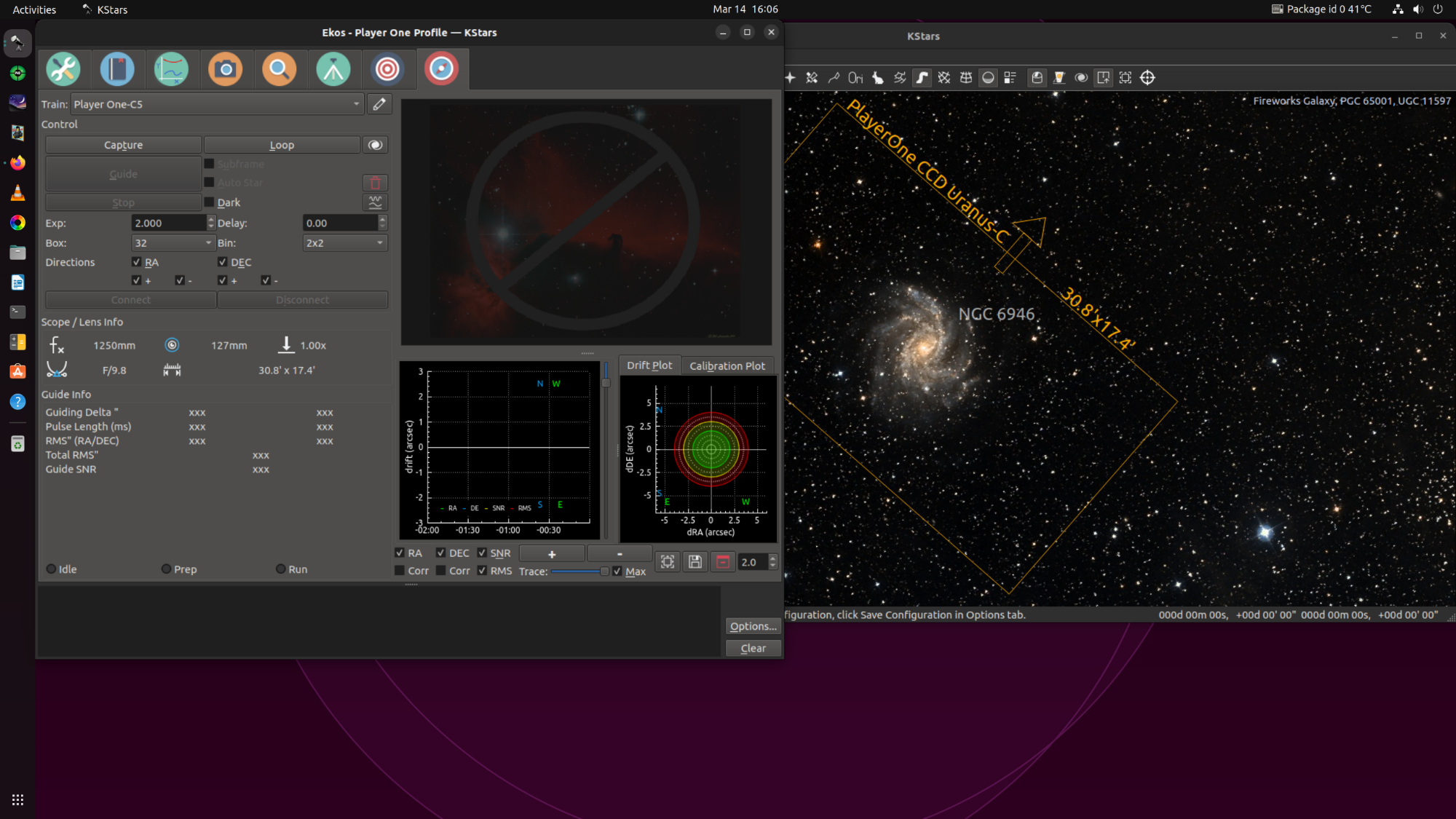
OK, I think I got it, thanks. So to follow up, if I were to use an OAG instead of a separate guide scope with, say, the C5, I would set up the guide camera as below?
Read More...
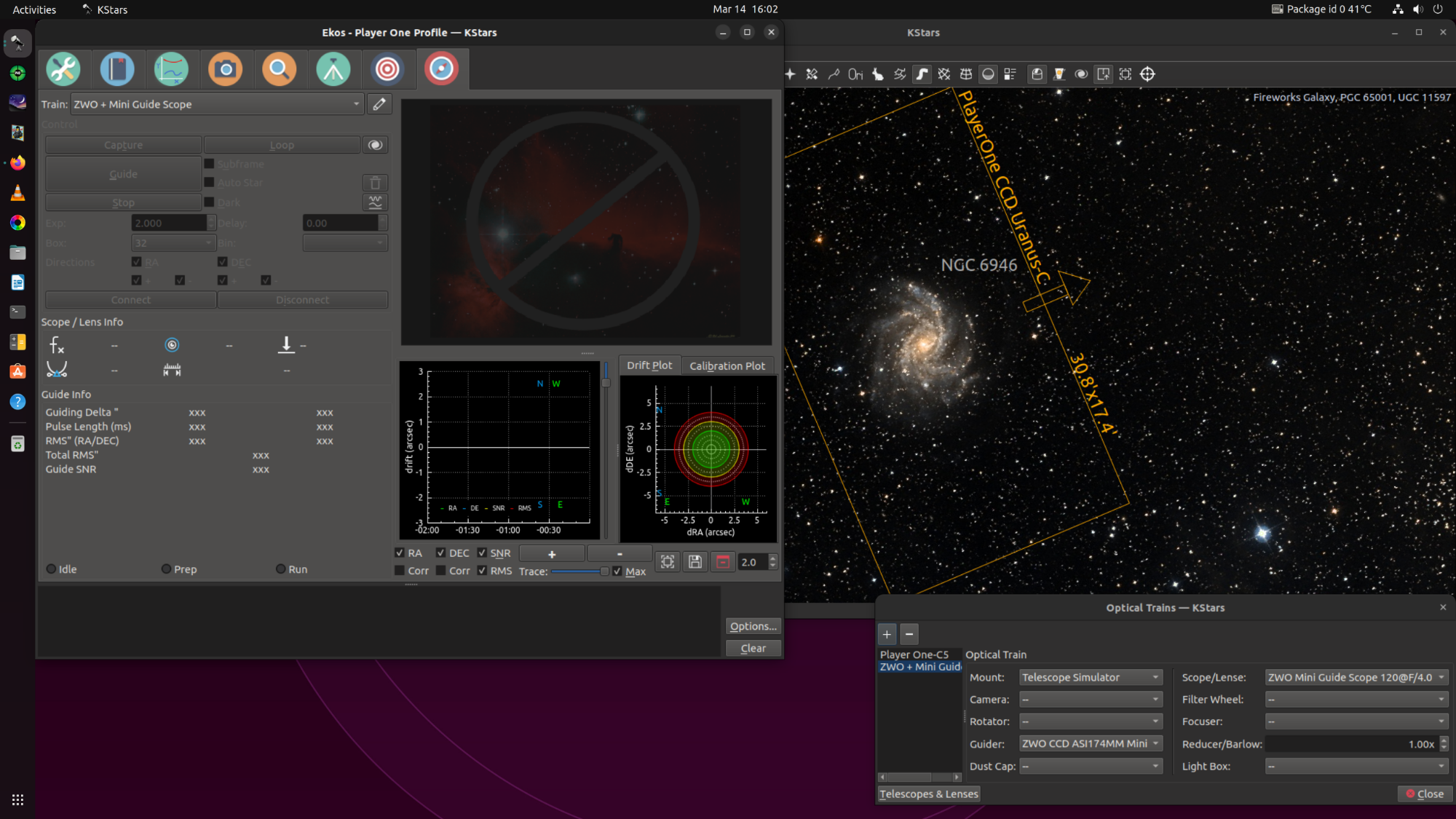
I'm not following this guys. I made what I believe you're asking, and I'm not seeing it working. Below you can see what I've done.
I used to be able to set where the guide camera communicated to in the Guide module. I don't see that setting there any more. Where is it?
When I set the guide camera in the Guide module, the top control panel is grayed out. If I set the main camera in the Guide module, the top controls return.
So I'm not understanding what I need to do here.
Read More...
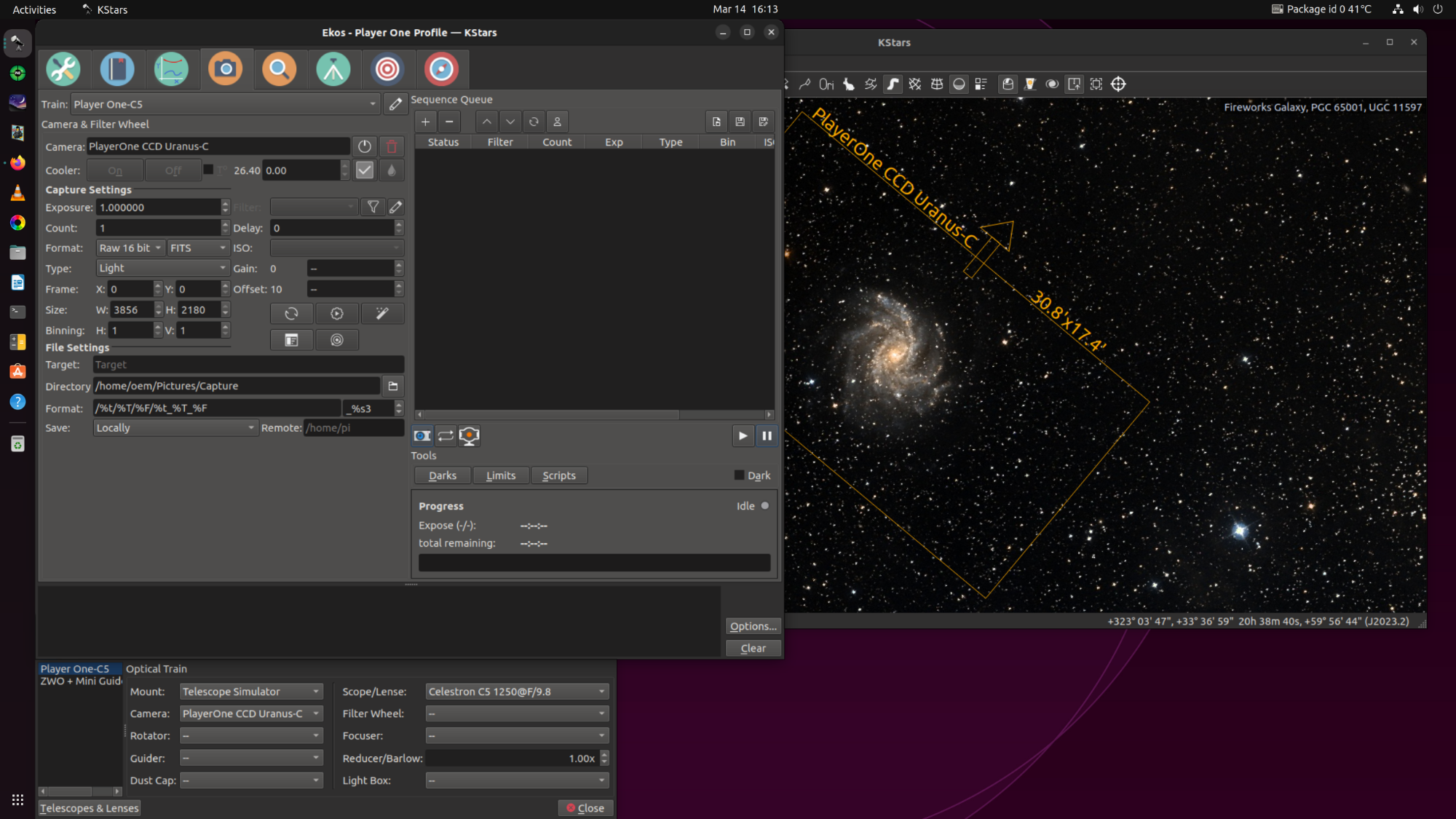
I'm trying to get KStars going on Unbuntu installed on a Mele Quieter 3C MiniPC, and the version available to download was version 3.6.3 using the "kstars-bleeding" install.
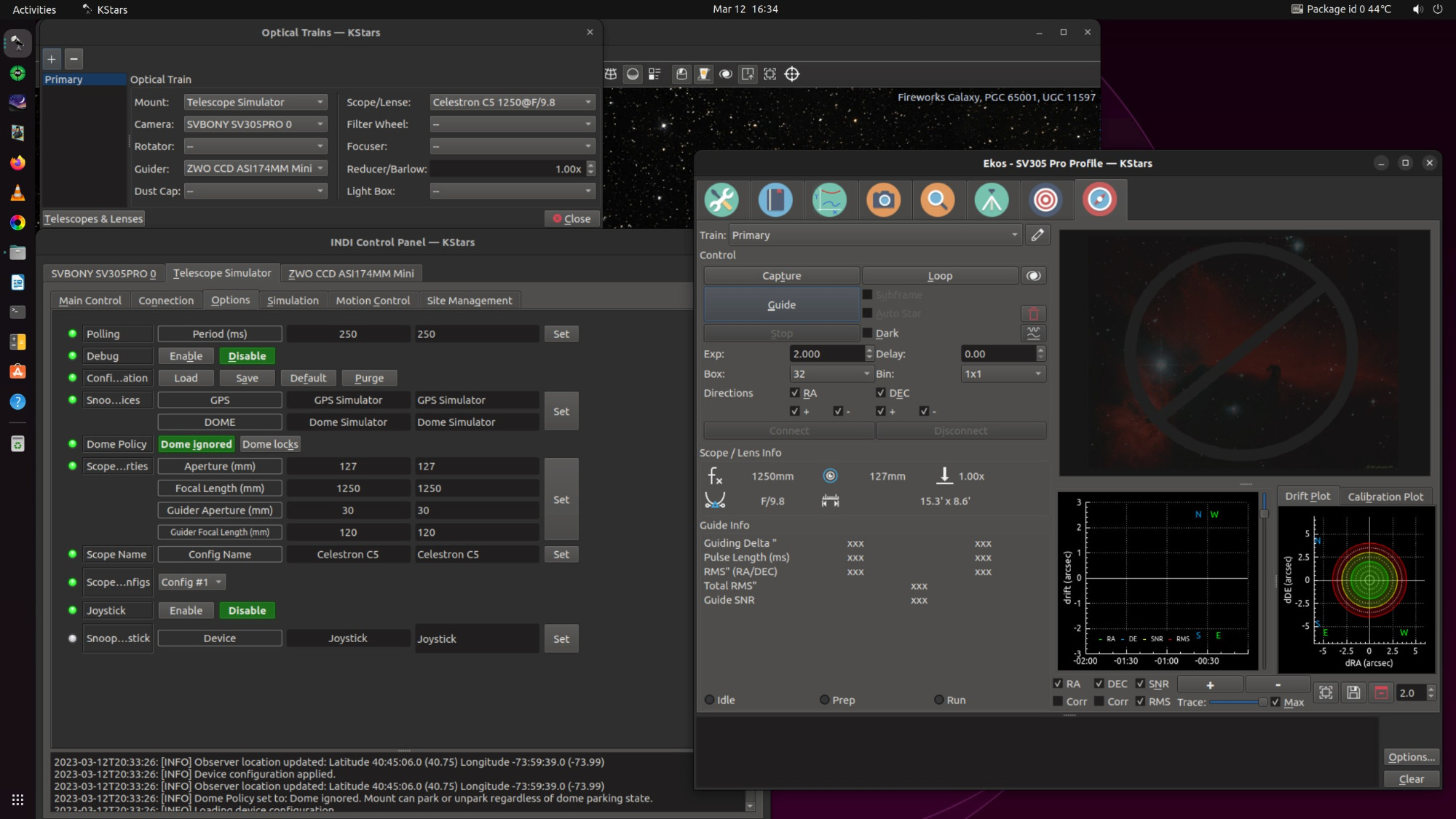
However this version is quite different from 3.6.0 that I am used to, and I don't understand how to get the modules to see the proper hardware. I have various imaging and guide cameras, scopes. as well as mounts. Normally the cameras and mounts would get set up in the Profile Editor, and the scopes in the mount module. But that is all different now, and no matter what I set up in the available setup boxes, Ekos only see the imaging camera and main scope, even in the guide module (I'm using a mount sim while running camera setups). There is no way to change any hardware parameters.
Below in one example of what I see with the available setup boxes.
How do I get the modules to see the proper hardware?
Also, is there a 3.6.0 version of KStars I can install on Unbuntu? That would really bypass all of this.
Thanks.
Read More...
So you're on a Linux laptop and not Astroberry? I was able to finally get it to run on Astroberry once I ran a general update, using the SV305 driver.
Read More...
Does Ekos automatically shift a mount's tracking mode to moon when you tell Ekos to center and track the moon? I noticed that when I do it using the sims it appears to do exactly that.
However I see independent settings in the INDI Control Panel to set the the tracking mode to sidereal, lunar, solar, or custom.
So how would I go about tracking the moon (or the sun) in Ekos? Does it change to the proper tracking mode automatically, or do I need to manually set it in the INDI Control Panel?
Thanks.
Read More...