INDI Library v2.0.7 is Released (01 Apr 2024)
Bi-monthly release with minor bug fixes and improvements
Please help fix this focus issue.
- Andrew Burwell
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

- Posts: 527
- Thank you received: 139
Replied by Andrew Burwell on topic Please help fix this focus issue.
Please Log in or Create an account to join the conversation.
- David Tate
-

- Offline
- Elite Member
-

- Posts: 309
- Thank you received: 40
Replied by David Tate on topic Please help fix this focus issue.
But you have a good point, I think it's very important to get into focus as close as you can manually before using the automation.
Please Log in or Create an account to join the conversation.
- Peter Sütterlin
-

- Offline
- Supernova Explorer
-
- Posts: 1009
- Thank you received: 133
Replied by Peter Sütterlin on topic Please help fix this focus issue.
That step size should be 'just' large enough to produce a clear focus change so that the algorithm can decide in which direction it should look for the focus. After that, the polynomial algo will anyhow compute its own step sizes.
I can second the suggestion to use SEP and full field, this (now) seems to work very stable. I'm also using it.
I have to admit, I'm also unsure about the max step size and max travel, ISTR that max travel was the (integrated absolute) steps it does during the whole process, to prevent it continuously oscillates. The max single step size you should be able to cut down to maybe 500-700 at max if you typical focus variation is 200 steps.
Please Log in or Create an account to join the conversation.
- Hy Murveit
-

- Away
- Administrator
-

- Posts: 1226
- Thank you received: 566
Replied by Hy Murveit on topic Please help fix this focus issue.
In general, I agree with Wouter's recommendations. In particular:
- SEP detection
- Full field star detection with an inner annulus of 25% and an outer annulus of 80%
- For the moonlight v2 controller on my 4" refractor, I use a step size of 25
- 5% tolerance
- If you find the focus goes far away sometimes, you can constrain it with maximum travel. E.g. give it some freedom, but if, e.g. it should never travel 300 steps away, then use 300. For those without such issues, it's OK to leave that very large.
- I'm not as much a fan of multiple exposures if you're already doing full field, but, of course, feel free to experiment.
- Self serving for me, but if you're having trouble with the Polynomial algorithm, try the Linear algorithm: see Jasem's latest announcement about 3.4.0 knro.blogspot.com/2020/02/kstars-v340-is-released.html
Tolerance is the percentage of HFR worse than the estimated best focus HFR that the algorithm is willing to "settle for". Setting it too tight, and the algorithm may never find it because of noise in the measurements and backlash and so on. Also, I know my Moonlight has backlash, I'd be very surprised if yours didn't. It's just that the driver has no mechanism for repairing it. The Linear focus algorithm attempts to deal with it.
Someday we'll have a focus wizard to set all these parameters :/
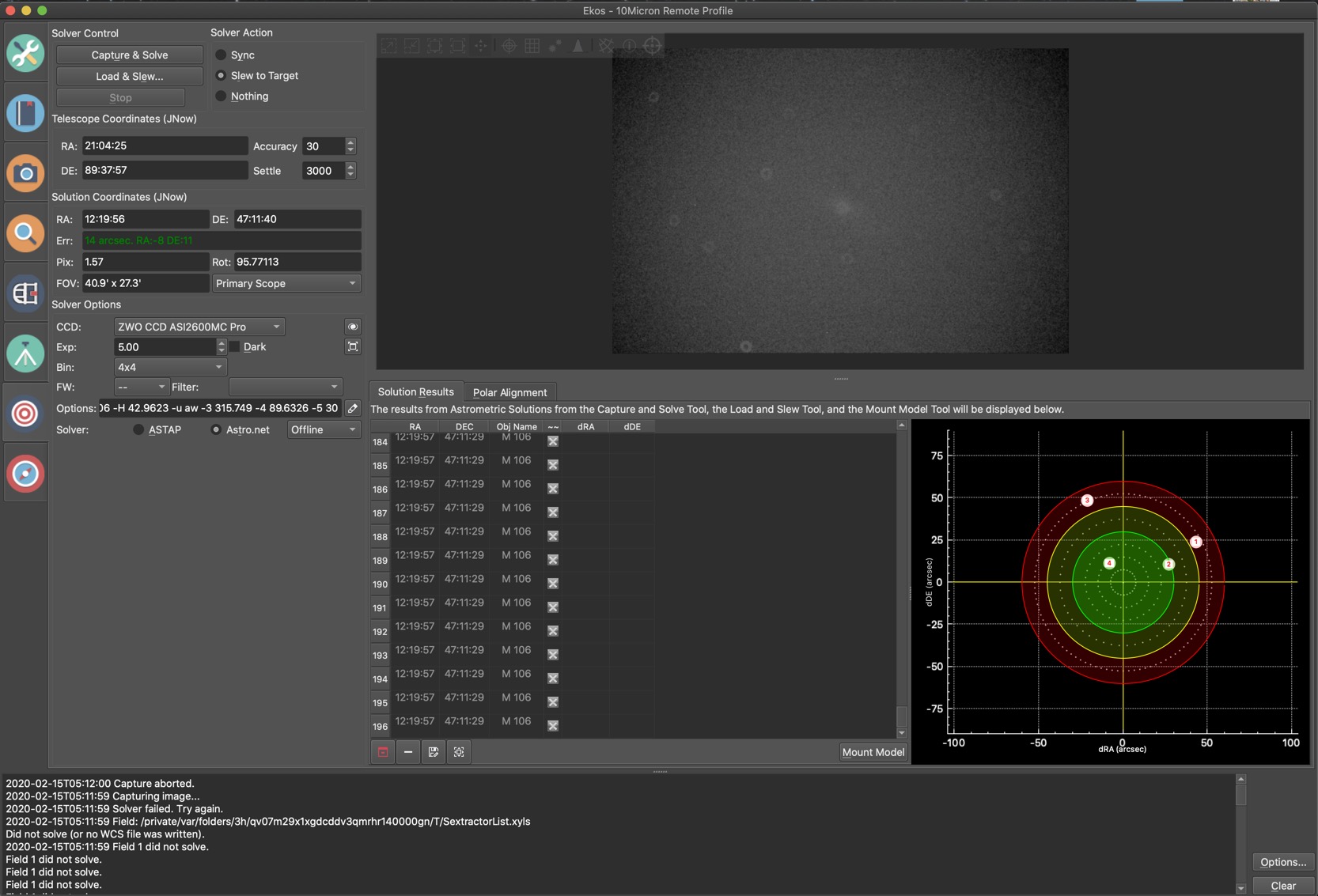
Focus (and align) can fair for reasons that can't be fixed, e.g. a cloud comes by. I agree that the system should be able to recover from those. You bring up a valid point that the system should not try to re-align 196 times
")
I've thought that we should also have a maximum HFR parameter, e.g. the AF algorithm should fail if the best HFR was 5. Do you have a log for that 196x align run?
Hy
Please Log in or Create an account to join the conversation.
- Andrew Burwell
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 527
- Thank you received: 139
Replied by Andrew Burwell on topic Please help fix this focus issue.
Unfortunately I didn't save a log. But I did manage to cut and paste the windows from both focus and alignment to text files. It's obvious from the screen shot that the focus system got out of focus by looking at some noise and not an actual star. This was half way through the evening (I had been imaging about 6 hours with refocus set every 45 minutes due to temperature variation). There must be some kind of threshold that could be set so that the focus algorithm doesn't pick up on noise, and insures there's a star. The star, when there, is obvious visually as it's a point source multiple pixels wide. The noise is clearly not a white point source. And this camera the ASI2600 is extremely low noise. I have the low profile Edge Moonlite focuser using the Pegasus Astro UPBV2 focus controller which does have backlash compensation, but they recommended turning it off for the Moonlite.
Hy, I love your suggestion about a wizard that could create a "focus profile" for each scope. It could measure the average distance the focuser has to move, and can automatically set some parameters around that to keep from getting too far away from focus on accident. It would have to be linked to the scope, not the focuser as I use the same Moonlite driver for all my scopes.
Thanks for the input Hy, you probably understand the system way better than I do.
Updated to add scheduler log.
Please Log in or Create an account to join the conversation.
- Wouter van Reeven
-

- Offline
- Supernova Explorer
-
- Posts: 1957
- Thank you received: 420
Replied by Wouter van Reeven on topic Please help fix this focus issue.
Wouter
Please Log in or Create an account to join the conversation.
- Andrew Burwell
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 527
- Thank you received: 139
Replied by Andrew Burwell on topic Please help fix this focus issue.
Yep, I will try that for sure. I was using full frame for some time as it did help with lots of focus failures. But switched back to single star as I thought it did a better job of getting better focus. Maybe it was all in my imagination.
Please Log in or Create an account to join the conversation.
- Peter Sütterlin
-
- Offline
- Supernova Explorer
-
- Posts: 1009
- Thank you received: 133
Replied by Peter Sütterlin on topic Please help fix this focus issue.
And for SEP: If you're unsure what it is, this is the algorithm of sextractor in library form, which (AFAIK) is one of the most robust source detectors....
Please Log in or Create an account to join the conversation.
- Andrew Burwell
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 527
- Thank you received: 139
Replied by Andrew Burwell on topic Please help fix this focus issue.
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
- Away
- Administrator
-
- Posts: 1226
- Thank you received: 566
Replied by Hy Murveit on topic Please help fix this focus issue.
Hy
PS Clear write up a review of your new camera--would love to hear more about it!
Please Log in or Create an account to join the conversation.
- Andrew Burwell
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 527
- Thank you received: 139
Replied by Andrew Burwell on topic Please help fix this focus issue.
Funny you should ask for a review. I just wrote one today. It's not too technical, just my experience so far.
Please Log in or Create an account to join the conversation.
- Hy Murveit
-
- Away
- Administrator
-
- Posts: 1226
- Thank you received: 566
Replied by Hy Murveit on topic Please help fix this focus issue.
Please Log in or Create an account to join the conversation.