

Hmm,
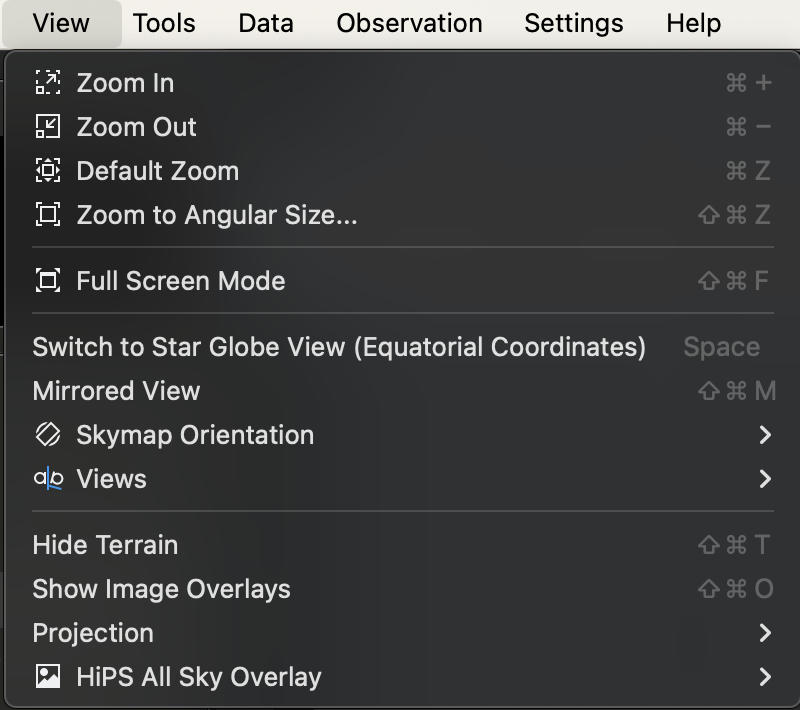
I downloaded the 3.7.0 stable DMG on my Mac with a build date of Build: 2024-04-04T05:15:20Z
and I see the Views sub-menu.
Read More...
I wonder if it's something caused by the default east meridian limit setting that Cuive noted in his video on the WarpAstron WD-20 youtu.be/SsbazQerH8g. at 15:40 into the video?
Read More...
I get this frequently with the latest nightly on Ubuntu 22.04 using NoMachine, going from my Mac to a MeLE Quieter 3C. Moving the displayed area and/or the zoom forces repaints that aleivate the problem for a bit for the affected overlay tiles.
Read More...

I'm guessing that this post might detail the directories of interest... indilib.org/forum/stellarmate/13955-copy...ellarmate.html#96543
Read More...
Well, I had downloaded using the link in #98509 and it runs on my M1 Mac Studio (only tested launching, not further testing by connecting ekos drivers).
I've just downloaded again, and the new version still works for me.
Note that I had right-click open twice as the 1st time, it refuses to give me the option to open the app anyway.
Cheers
Read More...
Really out of my league here, but is the gpsd driver the correct driver for a RS22 feed? What about GPS NMEA? I have a USB gps device and know it works with gpsd, but otherwise, I'm just guessing here.
Read More...